A cockroach-like robot named RHex is the starting point for a major project to understand animals' most distinguishing trait - how they move without falling over.
The National Science Foundation (NSF) announced today a $5 million, five-year grant to the University of California, Berkeley, that will fund an all-star team of biologists, engineers and mathematicians from universities across the country to try to understand the mechanical and neurological basis of locomotion. The grant is one of six totaling nearly $30 million through NSF's Frontiers in Integrative Biological Research (FIBR) program, which supports integrative research that addresses major questions in the biological sciences.
"The hallmark of life is movement," said Robert Full, professor of integrative biology at UC Berkeley and leader of the team. "Yet, no single systems-level model, reaching from neurons to muscles to the skeleton to the whole body, can explain the control that makes movement possible. You have so many nerves and so many muscles, how in the world do you actually move forward?"
Researchers from UC Berkeley, the University of Michigan, Princeton University, Cornell University and Montana State University will focus on RHex, a short, six-legged robot that scampers like a cockroach, as a working model of the principles they're seeking to uncover. By tweaking the robot and using it as a physical model, they hope to tease apart the complex neural and muscular networks in insects.
")
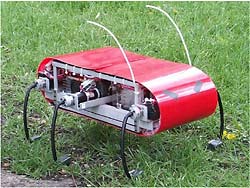
A real cockroach and RHex use similar techniques to keep upright while racing across uneven terrain. (Photos courtesy Robert Full, UC Berkeley [left] and Daniel Koditschek, University of Michigan [right])
At the same time, they will conduct biomechanical and neurological experiments on insects and develop mathematical models to improve the robot. This multi-pronged approach will allow them to uncover the neural and muscular control and feedback loops that lead to the remarkably similar patterns of whole-body motion in animals as diverse as crabs, cockroaches, lizards, dogs and humans.
"The robot has to operate in the real world, like the animal does, so we can use it for testing hypotheses," Full said. "We know, for example, that the body's center of mass bounces along like a pogo stick, which is embodied in the robot, but we don't know how its parts - its legs, feet, actuators or muscles - sum up to give that remarkably general pattern of movement.
"Now we can ask questions like, 'What if you had a more compliant leg? What if you had two joints in that leg, what does that give you versus one joint?' We can start putting artificial muscles in. Of course, that will make a better robot, but that is not the goal of this program."
Full has studied animal locomotion for 30 years, providing important insight not only to biologists, but also to engineers who have designed robots like RHex that mimic the movements of animals. RHex was built by Full's collaborators at the University of Michigan, led by Daniel Koditschek, professor of electrical engineering and computer science. But Full has contributed to other robots too: Ariel, which walks like a crab and was designed to operate in the surf zone and right itself if upended; Mecho-Gecko, which climbs up walls; and the Stanford-built Sprawlita, which bounces five body lengths at a time thanks to six piston-driven legs.
But, he admits, a biologist and an engineer can go only so far in understanding locomotion without the help of mathematicians and specialists in dynamics who can create models that can be tested on animals and robots. Full has coined the phrase "neuromechanical systems biology" for this multidisciplinary approach, which integrates data across mathematical models, numerical simulations, robot models and biological experiments.
The team he has assembled represents the best in these areas. While Full has run cockroaches, crabs, geckos and other animals on treadmills, across gelatin and over complex terrains to understand their stability, he is eager to team up with an experimental neurophysiologist who is able to interpret insects' neural code. John Miller, a professor of cell biology and neuroscience and director of the Center for Computational Biology at Montana State University, Bozeman, hopes to be able to rewrite that code while measuring motion, forces and neuromuscular signals. They will work closely with two mathematicians - Philip Holmes, professor of mechanical and aerospace engineering at Princeton University, and John Guckenheimer, professor of mathematics and theoretical and applied mechanics at Cornell University - who will analyze animal data to produce the mathematical models. The models will, in turn, provide feedback to Koditschek's robotic cockroach, which will serve as a controlled experiment that's easier to manipulate than real animals but able to tackle real-world challenges.
"This robot, the most mobile one built and created from the fundamental principles of what we know about animals, is going to help us address the grand challenge in biology - how they move," Full said.
NSF's FIBR program encourages investigators to identify major understudied or unanswered questions in biology and to use innovative approaches to address them by integrating the scientific concepts and research tools from across disciplines, including biology, mathematics and the physical sciences, engineering, social sciences and the information sciences. Among the other projects funded by NSF this year are BeeSpace, an interactive environment for studying social behavior in honey bees; a project that will examine how species that live together, evolve together; and a project examining how climate affects genetic variation and evolution.
"FIBR is one of the premier, crosscutting programs in biology at NSF," said Mary Clutter, head of NSF's Biological Sciences directorate. "By undertaking highly innovative and broadly integrative approaches to research in biology, FIBR projects tackle grand challenges and promote the training of a new and fearless generation of scientists willing and able to bridge conventional disciplinary boundaries."
Source: UC Berkeley























