May 30, 2013 report
Stanford Lab developing new kinds of robot aircraft (w/ Video)

(Phys.org) —Researchers at Stanford's Biometrics and Dexterous Manipulation Laboratory just south of San Francisco, have come up with two new innovations in robotic aircraft design. One is an improvement on jumping robots that mimic the actions of natural flying fish, while the other is a plane that can land on the side of a building.
Robots that can jump as their means of locomotion are useful in situations that are difficult to traverse and also require extreme energy efficiency. To make such robots, researchers tend to look to nature—flying squirrels, snakes and fish all get from one location to another by hurling themselves through the air. In studying nature's examples, it's become apparent that wings help a lot, both to extend a jump, and to help ease the landing. To that end, the researchers with this new effort have designed a jumping glider that works in similar ways to flying fish.
The plane is made of lightweight material and uses a carbon fiber spring to launch itself. To increase distance, the wings are kept pulled back when launching and extend during the glide back to Earth. This approach allows the plane to sail much farther than simple jumping robots, though it can't match them in achieving vertical heights.
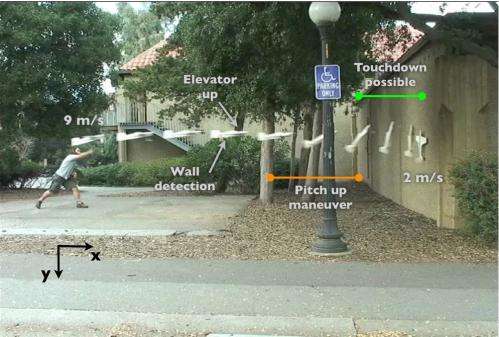
More impressive perhaps, is the perching Unmanned Aerial Vehicle (UAV) the lab has developed. It's a plane that flies straight at a building, but prior to crashing into it, pulls up into a stall that allows it to neatly perch against its side. Currently the plane has a very small motor—it gains flight by being tossed by a person standing several yards away from a building. The plane flies in a normal slightly arced horizontal trajectory, but just before reaching the building points its nose straight up at the sky so as to "land" its belly against the side of the building—where it remains hanging until taking off again. The UAV utilizes sensors and processors to gauge the proper time for going nose up, then relies on special hooked metal toes to help it cling to various surfaces. To take off, the hooked toes are pulled back like a cat retracting its claws while the propeller activates. The plane flies upside down as it leaves the wall then spins itself upright once stable.
The UAV uses very little power, makes little noise and can use its perching ability to spare its battery. For that reason the research team sees the plane as a means of conducting surveillance. In the future, the plane may have solar cells on its wings to allow for recharging as it perches.
More information:
Project page: bdml.stanford.edu/Main/PerchingHome
Research paper: Efficient Jumpgliding: Theory and Design Considerations (PDF)
© 2013 Phys.org




















