DARPA Z-Man program demonstrates human climbing like geckos

DARPA's Z-Man program has demonstrated the first known human climbing of a glass wall using climbing devices inspired by geckos. The historic ascent involved a 218-pound climber ascending and descending 25 feet of glass, while also carrying an additional 50-pound load in one trial, with no climbing equipment other than a pair of hand-held, gecko-inspired paddles. The novel polymer microstructure technology used in those paddles was developed for DARPA by Draper Laboratory of Cambridge, Mass.
Historically, gaining the high ground has always been an operational advantage for warfighters, but the climbing instruments on which they're frequently forced to rely—tools such as ropes and ladders—have not advanced significantly for millennia. Not only can the use of such tools be overt and labor intensive, they also only allow for sequential climbing whereby the first climber often takes on the highest risk.
DARPA created the Z-Man program to overcome these limitations and deliver maximum safety and flexibility for maneuver and rapid response to warfighters operating in tight urban environments. The goal of the program is to develop biologically inspired climbing aids to enable warfighters carrying a full combat load to scale vertical walls constructed from typical building materials.
"The gecko is one of the champion climbers in the Animal Kingdom, so it was natural for DARPA to look to it for inspiration in overcoming some of the maneuver challenges that U.S. forces face in urban environments," said Dr. Matt Goodman, the DARPA program manager for Z-Man. "Like many of the capabilities that the Department of Defense pursues, we saw with vertical climbing that nature had long since evolved the means to efficiently achieve it. The challenge to our performer team was to understand the biology and physics in play when geckos climb and then reverse-engineer those dynamics into an artificial system for use by humans."

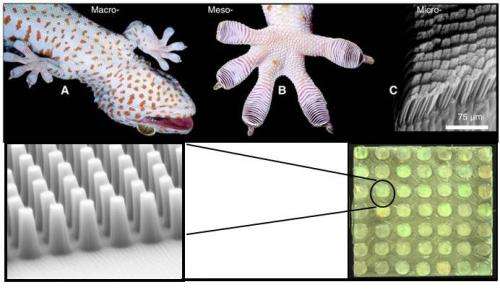
Geckos can climb on a wide variety of surfaces, including smooth surfaces like glass, with adhesive pressures of 15-30 pounds per square inch for each limb, meaning that a gecko can hang its entire body by one toe. The anatomy of a gecko toe consists of a microscopic hierarchical structure composed of stalk-like setae (100 microns in length, 2 microns in radius). From individual setae, a bundle of hundreds of terminal tips called spatulae (approximately 200 nanometers in diameter at their widest) branch out and contact the climbing surface.
A gecko is able to climb on glass by using physical bond interactions—specifically van der Waals intermolecular forces—between the spatulae and a surface to adhere reversibly, resulting in easy attachment and removal of the gecko's toes from the surface. The van der Waals mechanism implied that it is the size and shape of the spatulae tips that affect adhesive performance, not specific surface chemistry. This suggested that there were design principles and physical models derived from nature that might enable scientists to fabricate an adhesive inspired by gecko toes.
Humans, of course, have much more weight to carry than a gecko. One of the initial challenges in developing a device to support human climbing was the issue of scaling: a typical Tokay gecko weighs 200 grams, while an average human male weighs 75 kilograms. To enable dynamic climbing like a gecko at this larger scale required that the engineers create climbing paddles capable of balancing sufficient adhesive forces in both the shear (parallel to the vertical surface) and normal (perpendicular to the vertical surface) directions. That feature is necessary for a climber to remain adhered on a surface without falling off while in the act of attaching and detaching the paddles with each movement.
The Draper Laboratory team was also challenged to create novel micro- and nanofabrication technologies to produce the high-aspect-ratio microstructures found in the gecko toe. In the process of achieving that capability, the Z-Man performers transformed the fundamental design and development of reversible adhesives for potential biomedical, industrial, and consumer applications.
The first human climbing demonstration occurred in February 2012 and tests of the technology are ongoing.
Provided by DARPA





















