Caltech Rover ready for rock-yard competition in Houston
(Phys.org) -- Later this week, a four-wheeled robot designed and built by Caltech undergraduate students will maneuver, apparently under its own guidance, through various challenges at the NASA Johnson Space Center Rock Yard in Houston. In actuality, the robot's every move will be under the control of a group of those students who will be located back on campus, in the basement of Spalding Laboratory.
The Caltech group, which is named simply the Caltech Rover Team, will be competing for glory and prizes in a contest whose name is quite a mouthful: the Revolutionary Aerospace Systems Concepts Academic Linkage (RASC-AL) Exploration Robo-Ops Competition. Sponsored by NASA and organized by the National Institute of Aerospace, the competition will take place during a three-day forum, beginning May 30. The challenge will test the ability of rovers from eight universities to navigate sand dunes, climb out of mock lunar craters, pick up rocks, and more—all while being tele-operated off-site.
"This has been an amazing experience," says sophomore Daniel Lo, a physics and planetary science double major and the leader and organizer of the Caltech team. "In the beginning, I couldn't have imagined that our rover would turn out this great."
Each of the eight university teams were chosen as finalists based on written proposals submitted in December, then given $10,000 to build their rover and to send three team members and an advisor to the competition in Houston. Joel Burdick, professor of mechanical engineering and bioengineering, and Issa Nesnas of the Jet Propulsion Laboratory are the Caltech team's advisors.
During a recent demonstration on campus attended by onlookers including Caltech president Jean-Lou Chameau, team member Harrison Miller stood at a picnic table and operated a sensored master arm made of acrylic; his movements were transmitted and copied by the rover's own robotic "slave" arm. "Oh, that's so buttery," Miller said, marveling at the master-slave arm-control system's latest improvements. He was able to lead the rover through a challenge known as the "Tower of Hanoi" problem, which requires picking up, moving, and setting down disks of various sizes and weights in a particular order.
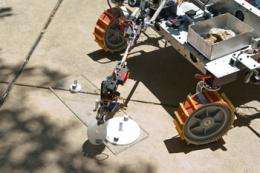
In the actual competition, the rocks that the rover will have to pick up will be lighter and easier to grip than the disks used in the demonstration. "If we can do this, we'll be fine," said Russell Newman, the team's chief designer and a senior mechanical engineering major. In addition, the rover arm's six degrees of freedom should allow it to reach over and around obstacles to gain access to target rocks.
The Caltech robot uses a so-called rocker-bogie suspension system, in which the differential links, or "rockers," of the undercarriage keep the vehicle balanced. This type of system is used by NASA's Mars rovers to give them the ability to drive over relatively large rocks and varying terrain, without tilting drastically—and, possibly, toppling over. As it traverses the Rock Yard in Houston, the rover's eight cameras will feed visual information via Verizon's 4G network to the operating team located in Caltech's Jim Hall Design and Prototyping Lab; the network will also deliver the team's commands to the rover.
Each team, in addition to being judged based on their rover's performance in the challenge, will be evaluated on a final written report and on education and outreach efforts. Caltech's team, for example, has a website and Facebook and Twitter accounts for its rover and has shared the project with several groups of local school children.
The competition in Houston will be streamed live on May 31 and June 1.
Provided by California Institute of Technology


















