March 14, 2012 weblog
Researchers replicate slime mold with brainless amoeboid robot that can move toward an attractant
(PhysOrg.com) -- Takuya Umedachi has been working for several years to build a robot that can replicate the simple actions of the common slime mold, an organism that can move towards something it desires without benefit of a brain or central nervous system. Now Umedachi and his colleagues at Hiroshima University have built such a robot and have published the specifics of how it works in the journal Advanced Robotics.
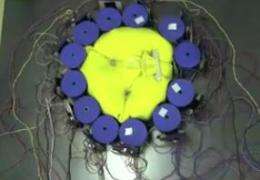
The amoeboid robot as they call it has two main parts, an air filled balloon center surrounded by fluid filled cylinders. The cylinders are connected to one another via springs attached to force sensors on one end and a DC motor on the other. Each spring also has a winding/unwinding component to allow the spring to pull the cylinder when it’s in move mode. And that is one of the keys of movement for the amoeboid. Each cylinder has a move and stuck mode. When in move mode, the cylinder can be slid in the direction of the attractant. When it stuck mode, it adheres to the surface (via electromagnet) to prevent the cylinder from being pushed backwards when other cylinders around it are moving. To get it to move towards an attractant, coupled oscillators are used to create a distributed sensory feedback loop.
The whole point of the amoeboid is its simplicity. It doesn’t require any programming or prior learning to do what it does, and that is just one thing. Move, slowly, bloblike, in the direction of the attractant. And because it’s soft-bodied, its shape alters automatically to allow it to fit though small spaces and once on the other side, to resume its most natural position. And while commercial applications are certainly limited to such things as delivering materials in hostile surroundings during an emergency, or providing sensor readings in a similar environment, they are beside the point. The real importance of the amoeboid is in the brilliance of its design and how what has been learned can be applied to other robotic applications. It’s not difficult, for example, to imagine future robots that launch an amoeboid when circumstances warrant, or the integration of amoeboid characteristics into household appliances to allow them to clean our floors without having to map everything out in advance.
The amoeboid is clearly still in its infancy, but portends many new and exciting advances in the robotics field that will come about due to out-of-the-box type thinking as is clearly demonstrated by Umedachi and his team.
More information: Fluid-Filled Soft-Bodied Amoeboid Robot Inspired by Plasmodium of True Slime Mold, Advanced Robotics, Volume 26, Number 7, 2012 , pp. 693-707(15). dx.doi.org/10.1163/156855312X626316
Abstract:
This paper presents a fluid-filled soft-bodied amoeboid robot inspired by the plasmodium of the true slime mold. The significant features of this robot are 2-fold. (i) The robot has a fluid circuit (i.e., cylinders and nylon tubes filled with fluid), and a truly soft and deformable body stemming from real-time tunable springs — the former seals protoplasm to induce global physical interaction between the body parts and the latter is used for elastic actuators. (ii) A fully decentralized control using coupled oscillators with a completely local sensory feedback mechanism is realized by exploiting the global physical interaction between the body parts stemming from the fluid circuit. The experimental results show that this robot exhibits adaptive locomotion without relying on any hierarchical structure. The results obtained are expected to shed new light on the design scheme for autonomous decentralized control systems.
via TechnologyReview
© 2011 PhysOrg.com





















