March 6, 2012 report
New robot 'Cheetah' breaks land-speed record
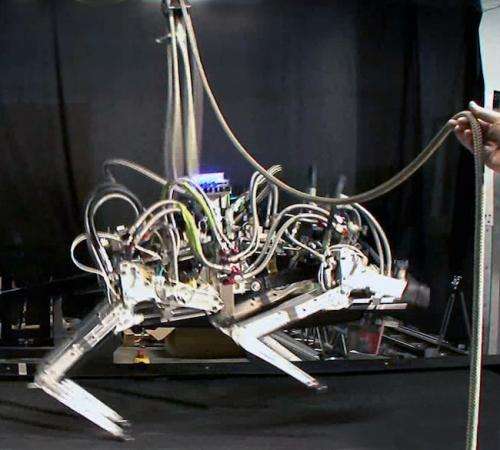
(PhysOrg.com) -- Up till now researchers at Boston Dynamics have demonstrated four legged robots that appear meant to carry heavy loads as they tromp through and over rough terrain (e.g. Alpha Dog and Petman, LS3). Now it appears they’ve taken a different approach in looking to build robots that can move fast. And apparently, they mean really fast. In the demo video they show off their new robot named Cheetah breaking the unofficial land speed record by galloping at eighteen miles per hour on a treadmill. Cheetah looks very much like the animal it was named for, even arching it’s back as it picks up speed. But clearly with such a name, the team is aiming much higher.
The research is sponsored by DARPA, which means the hope is that a robot that can run really fast in the real world could be used for unspecified military purposes, such as chasing down the enemy. But that is still a ways off. Cheetah is still tethered in place by hydraulic tubing and a boom to keep it on the straight and narrow.
Dr. Alfred Rizzi, technical lead on the project put out a press release in conjunction with the video and says that while eighteen miles per hour is pretty good, they are hoping for much more. In fact, he says he doesn’t see any reason why they couldn’t get the robot to run up to fifty miles per hour, which is what is possible on the specially designed treadmill. He adds that the purpose of the project is to see how far they can push this kind of technology. In the real world, the limit for a cheetah is in the neighborhood of seventy miles per hour, which is more than twice as fast as the current world champion human.
The Cheetah project falls under the Maximum Mobility and Manipulation program run by the US Defense Department that seeks to discover new ways for using robots in military applications. In the press release, the team also says they believe they’ll have Cheetah running un-tethered before the year is out. With a goal of finding the limits to such robots, it’s not hard to imagine one day a demo of a much more refined version of Cheetah that could conceivably leave its biologically restrained namesake in the dust.
More information: Press release
© 2011 PhysOrg.com





















