Meet "Hedgehog": Engineers build cube-like rover for exploration of asteroids, comets

Your best guess is that the landscape is as inhospitable as it gets: An irregular range of sharp boulders and loose rubble piles strewn among jagged crevasses and deep troughs of dust. But then again, it's just a guess because no one's ever actually seen this landscape up close. Now imagine that you need to send a robot across that landscape, from a perch at the lip of a steep crater to the edge of an ice-encrusted hole 1,000 meters away. And imagine that gravity is a tiny fraction of what we have on Earth. And you can't communicate with the robot because it's 50 million miles away and circling to the far side of Mars. What would that robot need to look like?
A cube, quite possibly
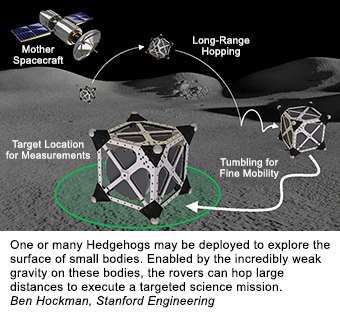
Meet Hedgehog, who could become our guide to exploring the small bodies such as asteroids and comets whirling about the solar system. Designed by Stanford's Marco Pavone, assistant professor of aeronautics and astronautics, and Ben Hockman, graduate student in mechanical engineering, this space rover has no wheels for rolling, no arms for grabbing and no legs for stepping. It's just a single overgrown die with the ability to hop and tumble itself across the unknown terrain of asteroids, comets and small moons. And while Hedgehog is not yet part of any planned space missions, the rover's research team recently cleared a significant hurdle along the way to turning their block robot into a space-exploration dynamo.
One small hop for rovers
The twin challenges of extreme environments and low levels of gravity make landing on and exploring small bodies exceptionally difficult, Pavone says. And while there have been a few spacecraft that have made contact with asteroids and comets, such as the Japan Aerospace Exploration Agency's Hayabusa mission and the European Space Agency's Rosetta mission, they have had only partial success. At best, such probes have been confined to the spot where they landed. "None of them have actually provided extensive exploration of the small body," Pavone says. "That's what we're after."
Hedgehog strikes just that balance, he says. "By turning a disadvantage for mobility [low gravity] into a requirement for mobility, the proposed rover would be able to do things on small bodies that are simply impossible right now – and yet, Dr. Pavone's proposed rover utilizes almost no new technologies, just uses existing technologies in a new, creative way."
A ride on the vomit comet
How Pavone and Hockman solved the riddle of low-gravity mobility is a story of creativity within constraints. In a microgravity environment, the type of wheeled or tracked rovers used to explore the surface of Mars would almost certainly fail. In environments where you would weigh as much as a paperclip and if you jumped hard enough you would never come back, wheels and treads would struggle to gain traction, and one little unforeseen jostle could easily tip a rover over to flail helplessly on its back. Instead of rolling along, Hedgehog exploits the fact that objects aren't so firmly anchored to the ground by hopping. Three internal flywheels are housed within a cube with corners that are beefed-up to absorb the shock of landing. Those flywheels move the cube through a process of internal actuation. By spinning and abruptly braking, the flywheels achieve varying amounts of torque, enabling the cube to controllably hop when it needs to cover distance, like a gymnast somersaulting across a mat. In the event that Hedgehog gets buried in a sandy sinkhole, it can even perform a "tornado" maneuver that corkscrews upward to escape.
At least, those were the researchers' theories of how Hedgehog would maneuver in microgravity environments. While some creative lab designs can approximate a microgravity analog here on Earth, Hockman says, such test beds all have one key flaw: Much like a marionette puppet, they require suspending the rover by a complex system of pulleys and counterweights to effectively offload gravity. To see how an untethered Hedgehog might actually perform in low-gravity contexts, in June 2015 the researchers took it for a ride on the "Vomit Comet," a NASA aircraft that swoops up and down in deep parabolas to provide a near-weightless environment.
The goal of autonomy
Now that the researchers have successfully proven that Hedgehog can reliably execute individual maneuvers, they must string together a series of hops and gyrations to enable the rover to move purposefully and independent of human control. "We're talking about environments that are so extreme, so far away, that either you have an autonomous robot or you just don't go there," Pavone says.
In concert with their colleagues at JPL, Pavone and Hockman are focused on developing the sensing and intelligence capabilities to enable Hedgehog to ascertain its present location and calculate what internal gyrations of its flywheels would be necessary to propel it to a desired location. "Autonomy requires a brain, which tells the robot where it is, where it needs to go and how to get there," Hockman says. "At Stanford, we're developing the navigation algorithms that allow Hedgehog to move intelligently, assuming we know its location. JPL is tackling the complementary problem: Given we have a plan and some sensing instruments, how does Hedgehog determine where it is?"
"It's pretty exciting, the types of missions and science return that this little cube enables," Hockman says. For instance, successful exploration of asteroids or even Phobos, the larger of Mars' two moons that is scarcely a dozen miles in diameter, could enable a strategic stepping-stone to a manned mission to the red planet. On a deeper level, Pavone says, the ability to gather and analyze the chemical and physical properties of asteroids and comets can give us a better understanding of the evolution of our solar system and the potential for extraterrestrial life.
"I hope we will see this rover fly in space, and sooner than expected," says NIAC's Derleth. "It is conceivable that Dr. Pavone's spacecraft could fly as a secondary payload on another mission, potentially exploring targets as interesting and important as Phobos and Deimos, the moons of Mars that may someday be human outposts in our journey to explore the solar system. These tiny rovers might be the first visitors, scouting out good locations and determining if there are any usable resources, while simultaneously helping us further scientific knowledge of how the solar system formed."
Hedgehog's successful hops and flips are another step down that path, but much remains to be done before it will be ready to strike out on its own.
"We're trying to increase the technological maturity of this platform and use the lessons learned from it to address other problems in the space-exploration domain," Pavone says. "Our mission is to infuse autonomy in space platforms, and enable them to do extreme stuff that has never been done before – stuff that no one has even dared to think about."
Provided by Stanford University





















