June 2, 2013 weblog
WABIAN robot from Japan steps closer to human walk
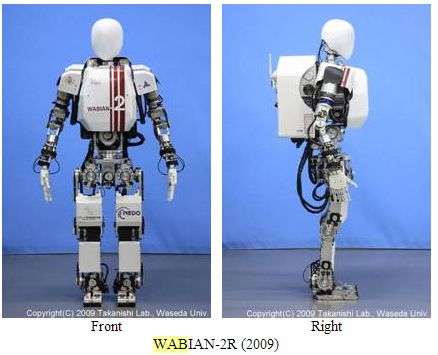
(Phys.org) —Researchers designing adult bipedal robots have faced a challenge in limitations in a robot's walking pattern. They seek ways to improve on designs to have robots move more naturally. Improving the walking function has been the goal of researchers at the Humanoid Robotics Institute at Waseda University in Japan. Last month, led by Professor Atsuo Takanishi, the team presented the results of their efforts at the IEEE International Conference on Robotics and Automation (ICRA) in Germany. What they achieved more closely replicates normal human foot movements than before. The Institute's researchers turned to their humanoid robot, WABIAN-2R (WAseda BIpedal humANoid - No. 2 Refined), which already had a flexible pelvis, and stretched knees. WABIAN-2R's feet also had the distinction of a curving arch and flexible toes, landing heel-first and lifting off at its toes, noted the IEEE Spectrum report. The robot is under 5 feet tall (148 cm), and weighs 64 kg (141 pounds), with 41 degrees of freedom.
Their work on WABIAN has been in step with the Japan government's concern about technology for an aging population, to preserve a decent quality of life for the aging, despite limitations on freely moving about that may result from old age. The team stated in the past that a robot as "a human's partner" would provide daily robotic assistance, and that kind of application was more in their line of view than an industrial robot earmarked for highly specified and constrained applications.
To accomplish the task, robots have to be able to move in indoor and outdoor conditions, they said, and biped humanoid robots are best suited for this. They also noted that aside from robots as human assistants, there was a need for evaluation methods for assistive equipment, dependent on human body measurements. A biped humanoid robot optimized to serve as a human motion simulator is a step in the right direction.
In their latest workup of the WABIAN robot, now called WABIAN-2RIII.the researchers redesigned lower legs, after studying humans walking. They analyzed the average size and movement range in humans, and analyzed motion-capture data to decide on the best performance requirements.
The researchers, T. Otani, A. Iizuka, D. Takamoto, H. Motohashi, T. Kishi, P. Kryczka, N. Endo, L. Jamone, K. Hashimoto, T. Takashima, H.O. Lim, and A. Takanishi, discuss their work in the paper presented at ICRA. The paper is titled, "New Shank Mechanism for Humanoid Robot Mimicking Human-like Walking in Horizontal and Frontal Plane." According to IEEE Spectrum, they had the following results: In tests of walking in place, (1) they were able to match the human step time of 0.6 seconds; (2) they matched the required 12-degree foot rotation and 90-mm step width; (3) they successfully reduced its center of mass lateral movement from 50 mm down to 34 mm.
The researchers only conducted standing tests, with walking in place, and switching balance from foot to foot. In the future, the researchers intend to work on the robot's forward walking.
More information:
www.takanishi.mech.waseda.ac.j … top/research/wabian/
via IEEE Spectrum
© 2013 Phys.org




















