December 28, 2013 weblog
NASA team studies ball bot as future space explorer
(Phys.org) —A July NASA report on the Super Ball Bot said that lightweight and low-cost missions will become increasingly important to NASA's exploration goals. Current robot designs call for a combination of devices such as parachutes, retrorockets and impact balloons to minimize impact forces and to place a robot in a proper orientation. Is there a different model one can consider for future explorations to accommodate NASA goals? A detailed report in IEEE Spectrum looks at a team at NASA Ames Research Center who "suspect there might be a way to make solar system exploration much simpler and cheaper, by embedding science instruments inside a flexible, deformable robotic exoskeleton."
The researchers, who produced the NASA report, are focused on a promising way to explore the solar system. Namely, they are working on the Super Ball Bot fashioned on the concept of "tensegrity." IEEE Spectrum noted the term was coined by architect Buckminster Fuller, in reference to the words "tensional" and "integrity."
This would be a robot built upon tensile and compression elements. The key advantages to their Super Ball Bot would be in its ability to take on the dual role of landing and mobility efficiently. "Such robots can be both a landing and a mobility platform allowing for dramatically simpler mission profile and reduced costs," the report said. In brief, the robot could take on multiple functions in one structure.
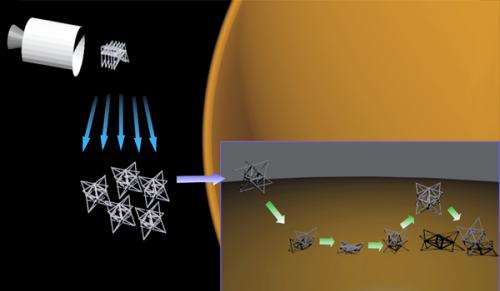
Adrian Agogino, Vytas SunSpiral, and David Atkinson, authors of the NASA report, said, "Ideally, teams of dozens or even hundreds of small, collapsable robots, weighing only a few kilograms a piece, will be conveniently packed during launch and would reliably separate and unpack at their destination." The team offered a scenario where the robot could be collapsed to a very compact configuration for launch and would pop open and drop to the surface, flexing and absorbing the force of impact. Once on the surface, the ball would roll around without wheels, able to effectively maneuver its movements in the environment, extricating itself from soft sand or other challenging surfaces.
While there are no wheels to it, the ball is compared as one single wheel, moving along, and making use of its rods to push and pull itself out of difficult spots. The ball can leverage its network of rods and cables to move as it needs to. Another advantage in its structure is that the more, the better, for the mission: Single-robot explorations are problematic when there is imprecise knowledge of terrain and unstable precipitation cycles. Teams of dozens or hundreds of such robots could instead explore a hazardous destination.
Earlier this year, the team was awarded a Phase II grant to continue the research, in their efforts to build this "tensegrity" robot. Vytas SunSpiral and Agogino in a recent video described their work, also described in detail in IEEE Spectrum. If all goes well, said the IEEE report, "Titan might one day seen an armada of tumbleweed-like robotic explorers, hunting for evidence of life on the hazy moon." The goal has been a Super Ball robot capable of sustaining large falls, rolling over a range of terrains, and protecting a payload of instruments.
In a bigger picture view, in a Google Tech Talk that SunSpiral gave in November, he said that "The big story that we are dealing with" in the robot world is a generation shift, from traditionally made rigid systems using engineering tools and techniques, to a move toward "softer, more compliant systems." Robots are being taken out of structured laboratories to grapple with the more natural world. In turn, one can see how the NASA team is investigating how that shift relates to space robotics.
More information:
www.nasa.gov/directorates/spac … no.html#.Ur4w5fRDsu5
www.nasa.gov/centers/ames/cct/ … iac_superbot_prt.htm
spectrum.ieee.org/automaton/ro … -could-explore-titan
© 2013 Phys.org




















