August 16, 2013 report
Tiny robot able to reorient itself during jumps using actuated tail (w/ Video)
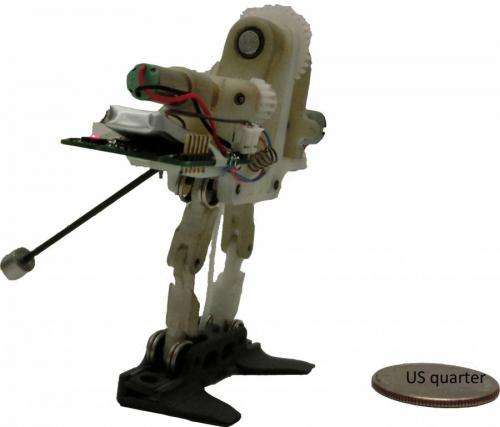
(Phys.org) —A team of researchers at Michigan State University has built a tiny robot (called the TailBot) that is capable of moving itself around on wheels, jumping and also manipulating its body while in mid-air (using its using actuated tail) to assist in a safe and controlled landing. The researchers note that others have built robots with similar abilities but to date, it is their belief that this is the first instance where all three abilities have been implemented in one robot.
As the researchers note, jumping is a very efficient way to avoid predators in the animal world or to get around obstacles—it consumes far less energy than maneuvering around an obstacle or taking flight. Other jumping robots have been built but on a much larger scale. The TailBot weighs just 28 grams and is a minuscule 6.5 centimeters tall. A smaller robot allows for jumping higher relative to its body size, and for surviving the impact once it returns back to Earth. The TailBot is able leap up into the air as high as 10 times its own body size. By modifying its orientation mid leap, it can prevent being damaged when it falls back down, as well as making sure it lands right side up, ensuring that it can move around again.
All in all, the way the robot moves is both unique and interesting. It can roll around via wheels on flat surfaces in a lying down position (looking sort of like someone pedaling a recumbent bicycle). When it "wants" to hop, it pushes itself up into a standing position. Once upright, it crouches then releases, launching itself into the air. While it's airborne, it moves its tail to change its center of gravity, allowing it to land in its lying down position. Also, once upright, if the robot wants to lie down (to roll around again) it uses its tail to do so in a reasonably graceful manner.
Possible uses for such a robot might include search and rescue (because it can get around objects in its path), exploration of unknown terrain (such as on another planet) or perhaps simply as a new kind of toy.
More information:
www.egr.msu.edu/~zhaojia1/doku.php?id=tailbot
Controlling Aerial Maneuvering of a Miniature Jumping Robot Using Its Tail: www.egr.msu.edu/~zhaojia1/lib/ … tailbot_iros2013.pdf
© 2013 Phys.org













.gif)





