July 26, 2013 weblog
Japan's IBIS keyhole surgery robot demonstrated (w/ Video)
A group of robotics scientists in Japan have demonstrated their pneumatic robot, IBIS, which is designed for performing keyhole surgery. They say it may cost as little as one tenth the price of its main rival, Intuitive Surgical's da Vinci robot.
The team of scientists from the Tokyo Institute of Technology (TokyoTech), have been developing their robotics system for some years. It consists of a master unit connected to a slave unit. The master unit is operated by the surgeon, who views the surgery on a stereoscopic 3D display and moves the robot's arms by means of two finger- and hand-operated joysticks with multiple controls. The slave unit consists of pneumatically driven arms that carry out the delicate surgery.
IBIS is unusual in being driven pneumatically, and they say this makes the robot arms more gentle when it touches the patient because the air pressure at the tip of the robot arm can be used to estimate the force being applied. Being pneumatically operated also means the system can be more lightweight and compact than similar electrically operated robots.
One advantage of using robots to perform keyhole surgery is that they eliminate hand shake, which can be a problem in this type of minimally invasive surgery, where a steady hand is vital. The force feedback signals relayed to the operator are produced without the need for force sensors, simply by inference from the air pressure at the tip. The lack of force feedback has been a major challenge in the development of successful robot-assisted minimally-invasive surgery (RMIS).
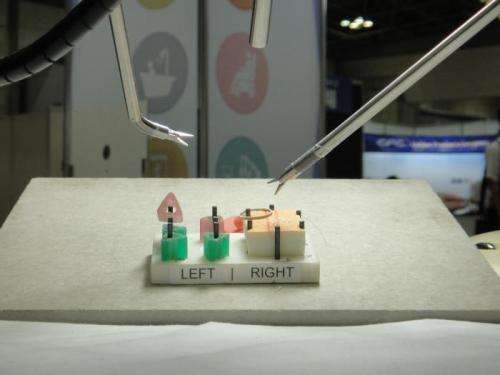
Associate Professor Kotaro Todano of the Precision and Intelligence Laboratory at TokyoTech recently demonstrated IBIS, and showed that operators had fine control of the arms in manipulating a variety of small objects.
The Intuitive Surgical da Vinci robot is priced at around two million US dollars, and the TokyoTech team think their robot will cost somewhere between one tenth and one third of its American rival, partly because it is more compact and pneumatic, but also because many off-the-shelf components are used in its construction. They expect the robot will be available for practical use in four or five years.
Via Diginfo TV
© 2013 Phys.org




















