Underground mission to Mars
The Netherlands is home to around 120,000 kilometres of underground gas pipelines. Researcher Edwin Dertien of Dutch University of Twente is working on a robot which can inspect the gas pipelines independently. His long, thin robot will snake its way through the pipe network. “It’s like a mission to Mars, but then underground.”
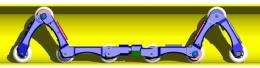
The Pirate (Pipe Inspection Robot for Autonomous Tunnel Exploration) resembles a miniature train. It is over half a metre in length and has eight wheels. At present it runs on power from a lead that trails behind it, but the design has already incorporated space for a battery so that it will soon be able to zoom around independently. UT researcher Edwin Dertien has been hard at work on the robot since 2006, in collaboration with engineering firm Demcon, network company Alliander and quality control experts Kiwa Gastec.

Preventive measures
Edwin explains what led him to develop the Pirate. "Around 8000 gas leaks are discovered in the Netherlands each year. Some are discovered when people smell gas and some are traced using "sniffing systems" in the form of sensors that can detect gas. The problem with these methods is that you discover the weak points in the pipeline too late, i.e. once a leak has already sprung. The aim of the Pirate is to seek out weak points in the pipeline as a preventive measure."
Mars mission
Building a robot that can travel through gas pipelines may seem relatively simple, but as Edwin explains, the degree of complexity is high. "Travelling straight ahead is not too tricky but the robot encounters all kinds of obstacles in the pipelines, ranging from bends and constrictions to valves and diagonal pipes." An additional factor is that communicating with a robot on the move underground is all but impossible. Edwin compares the project to a Mars mission. "Under those conditions a robot has to negotiate uncharted territory and respond to stimuli that are picked up by its sensors. The robot therefore has to be so smart that it can continue to operate and complete its mission even when faced with disturbances."

T junctions
The Pirate has been designed for pipes with a diameter of between 5 and 12 centimetres. The robot attaches itself to the wall of the pipe by folding its front and rear segments to form an inverted V shape. This clinging technique also enables the robot to travel along diagonal pipes. To make sure that the robot can negotiate bends, the Pirate has a central axle which allows the front and back sections to rotate independently of each other. Edwin is currently refining the robot's steering system with final-year student Harwin Reemeijer. "The trickiest challenge is getting through a right-angled turn, as you would encounter at a T junction. When the front of the robot goes into the turn, it is forced to let go of the wall, which means it loses part of its momentum."

Eyes and ears
Once the robot is fully functional in terms of steering and motion, it will be fitted with sensors which will act as its proverbial eyes and ears. Edwin will fit the robot with a camera and a laser which work in unison so that the robot not only "sees" where it is going and where obstacles lie, but can also measure whether the pipe is round enough and free of dents, which can be caused by tree roots for example. An ultrasonic microphone will function as the robot's ears and listen out for gas escaping from the pipes. Edwin expects that his robot will be ready to embark on its maiden trip through the Netherlands' gas pipeline network in three to four years' time.
Provided by University of Twente (news : web)















