February 12, 2013 weblog
Swimming-pool ships make waves in modular robotics (w/ Video)
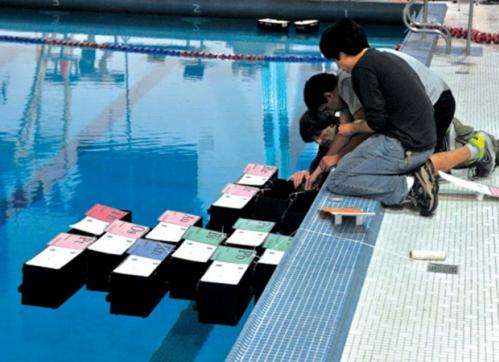
(Phys.org)—University of Pennsylvania engineering Professor Mark Yim and his students in the Department of Mechanical Engineering and Applied Mechanics have been floating their robotic boats at the university pool after-hours as part of a Defense Advanced Research Projects Agency (DARPA) project. They have received funding from DARPA's Tactically Expandable Maritime Platform.
The idea is for DARPA to draw upon the robotic boat project as research that can serve their goal of designing systems that move containers in agile ways, as linked-together boats to form islands, or to form bridges, or to serve as landing strips. The systems are for disaster response and other military purposes. According to DARPA, "The vision is to enable humanitarian assistance and disaster relief over broad coastal areas without dependence on local infrastructure, using unmodified commercial containerships, thus freeing military ships to carry out other military missions."
Prof. Yim said DARPA wants eventually to scale this system up to size, envisioning their being able to jump off the boat and form a variety of instantly formed structures. The students, in designing their robotic systems, are doing a scaled-down model of what DARPA intends to do.
The team has been renting out the pool several nights a week and they conduct their experiments, with their robot swarms taking over the pool, into the early morning hours.
The team built over 100 miniature shipping container "boats" out of laser-cut black plastic. As a video shows, the containers look like large shoe boxes. The containers are each named after a chemical element. The boats are controlled with Gumstix computers, which are Linux computers-on-modules. The computers tell the boats where to go.
Yim and his students have written and manipulated code to get the boats to perform their tasks. When the assignment is to form an island, the boats move into place and hook together.
Prof. Lim's research interests lie squarely in modular robots, which are machines made up of modules that can function alone or can be configured for a specific task. These types of robots are made up of identical active components that can be arranged to form numerous configurations—from snake to humanoid to centipede shapes. The systems can also self-reconfigure, depending on the called-upon task. Instead of sending ten different robots to do ten different things, notes Lim, one can have one robot that can do those ten things.
More information: Via www.thedp.com/article/2013/02/ … ats-in-pottruck-pool
Copyright 2013 Phys.org
All rights reserved. This material may not be published, broadcast, rewritten or redistributed in whole or part without the express written permission of Phys.org.



















