July 30, 2012 weblog
Built from scratch: WiFi-extending robot beast (w/ Video)
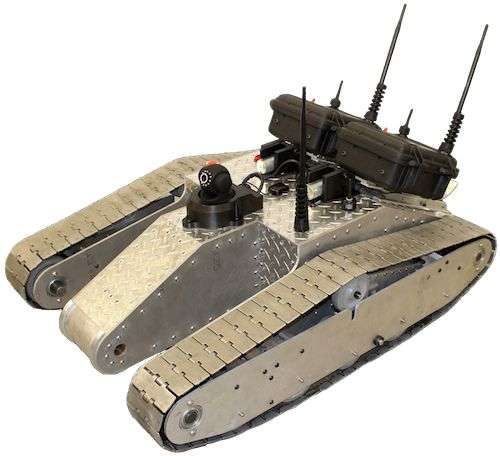
(Phys.org) -- Students at Northeastern University in Boston have designed and built a reconnaissance WiFi-extending robot that can enter hazardous, rugged territory. They built the robot as part of their senior project for Northeastern’s Capstone design program. Their descriptive references to the robot as a “monster” and “beast” are not that much of an exaggeration. The system is customized for hazardous areas with its onboard webcam and microphone; night vision, pan and tilt; and onboard GPS for location tracking, where network infrastructure is scarce. The system weighs about 150 pounds, is a little more than three feet long and two feet wide. It has carried at least a 200 pound person on its back, said team member Glen Chiacchieri.
With the exception of the treads, it was built entirely out of aluminum. “I and seven other computer and electrical engineers built this monster as part of a senior design project at Northeastern University,” he stated.
Running time is 12 hours. The range is 1 km, with one on-board router and two droppable long-range repeater modules. The robot system was built with an EEE PC running Ubuntu, Arduino, and Node.js.
As for the computer, he said his My EEE PC running Ubuntu Linux with its solid-state drive and small form factor seemed to be a good candidate to stow on-board the robot. As for Node.js, Chiacchieri said that, given the robot’s processing of a variety of data asynchronously, an event-driven model made sense, and this is what Node.js provides. Node.js is a server-side solution for JavaScript for those concerned with network programming and server-side request/response processing, in particular, for receiving and responding to HTTP requests. The robot was written almost entirely in JavaScript.
The robot is controlled over a WiFi network that originates on the robot and is extended by dropping the black repeater units on its back. From the web interface, one can control the robot's speed and direction using the keyboard's arrow buttons or web buttons; view webcam footage and control it including pan/tilt, night vision, and audio; drop WiFi repeater units to extend the robot's range; and begin replaying the robot's movements backward if it loses its WiFi connection.
They chose consumer-grade Linksys routers loaded with open-source dd-wrt firmware, to be able to configure the routers as network repeaters. Long-range antennas, power amplifiers, and 14.8V lithium-polymer batteries were used. “Finally, we put all this in a Pelican case to protect them from the elements. These are attached to aluminum skis and fastened to the robot with a 3D-printed latch mechanism that is actuated by a solenoid.”
Moving to the construction stage, they made use of a hacker space called Artisan's Asylum. The idea for the robot was inspired by research papers and calls for proposals to build WiFi-deploying robots for use in military applications. “Our group thought that the need for a WiFi deployment system was high enough to justify further exploration," said Chiacchieri, “and eventually we hit upon the idea that we could also use a robot to deploy a network while doing reconnaissance, and that this robot could also be controlled over the network it was deploying.”
More information: glench.com/make/nodejs-robot/
© 2012 Phys.org





















