June 22, 2017 report
Software on Mars rover allows it to pick research targets autonomously

(Phys.org)—A team of researchers form the U.S., Denmark and France has created a report regarding the creation and use of software meant to give exploratory robots in space more autonomy. In their paper published in the journal Science Robotics, the team describes the software, called Autonomous Exploration for Gathering Increased Science (AEGIS), and how well it performed on the Mars rover Curiosity.
Because of their limited computing power and distance from the Earth, space scientists believe that it would be advantageous for exploratory robots to have the ability to select which things to study. It would also allow for more research to be done when a robot is not able to communicate with Earth, such as when it is on the opposite face of a planet. Without such a system, a robot would have to scan a region, photograph it, send the photographic images back to Earth and then wait for instructions on what to do. With such a system, a robot such as Curiosity could scan the horizon, pick an object to study and then drive over and study it. This approach would save a lot of time, allowing the robot to study more objects before its useful lifespan expires. Because of that, NASA commissioned a team to create such software, which eventually became AEGIS. The software was tested and then uploaded to Curiosity in May of 2016 and was used 54 times over the next 11 months.
The software allows the rover to control what has been dubbed the ChemCam, which is a device that is used to study rocks or other geologic features—a laser is fired at a target and then sensors measure the gases that occur as a result.
The researchers report that they found the system to be 93 percent accurate compared to 24 percent without its use. The software, they claim, saved many hours of mission time, which was used for engaging in other useful activities such as studying meteorite content. They also report that the software allowed for an increase in ChemCam targeting from 256 per day to 327, which meant that more data was collected in the same amount of time.
-
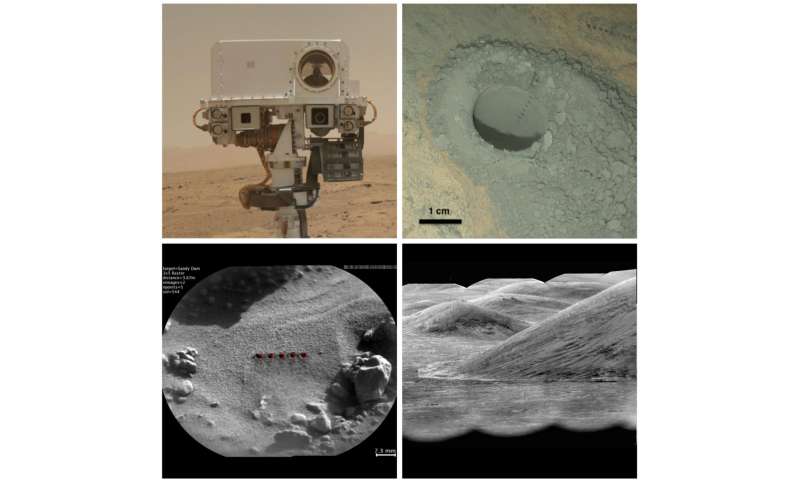
(A) The ChemCam gaze. (B) ChemCam shoots lasers at rocks to analyze their content, leaving visible marks both on the surface (upper right) and inside the 16-mm-diameter drill hole (center) of this “Windjana” drill site. (C) ChemCam-measured soil targets. (D) The Remote Micro-Imager on ChemCam shoots high-focus photos of distant targets, such as this area in the Peace Vallis alluvial fan, approximately 25 km away. Credit: Francis et al., Sci. Robot. 2, eaan4582 (2017) -
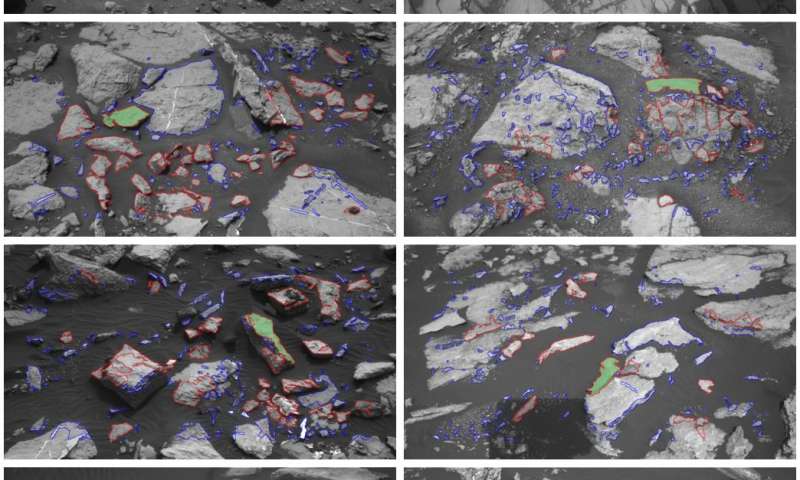
Examples of AEGIS target selection, collected from Martian day 1400 to 1660. Targets outlined in blue were rejected; those outlined in red were retained. Top-ranked targets are shaded green, and second-ranked targets are shaded orange. Credit: Francis et al., Sci. Robot. 2, eaan4582 (2017) -
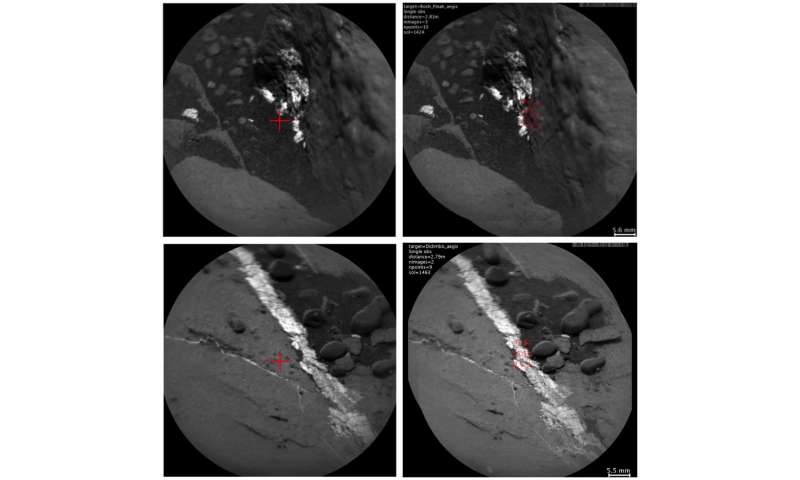
Examples of AEGIS fixing human commands that miss the mark, called “autonomous pointing refinement.” (A, C) Human-calculated targets in red. (B, D) Target refinement by AEGIS indicated in red. Credit: Francis et al., Sci. Robot. 2, eaan4582 (2017)
More information: AEGIS autonomous targeting for ChemCam on Mars Science Laboratory: Deployment and results of initial science team use, Science Robotics (2017). robotics.sciencemag.org/lookup … /scirobotics.aan4582
Abstract
Limitations on interplanetary communications create operations latencies and slow progress in planetary surface missions, with particular challenges to narrow–field-of-view science instruments requiring precise targeting. The AEGIS (Autonomous Exploration for Gathering Increased Science) autonomous targeting system has been in routine use on NASA's Curiosity Mars rover since May 2016, selecting targets for the ChemCam remote geochemical spectrometer instrument. AEGIS operates in two modes; in autonomous target selection, it identifies geological targets in images from the rover's navigation cameras, choosing for itself targets that match the parameters specified by mission scientists the most, and immediately measures them with ChemCam, without Earth in the loop. In autonomous pointing refinement, the system corrects small pointing errors on the order of a few milliradians in observations targeted by operators on Earth, allowing very small features to be observed reliably on the first attempt. AEGIS consistently recognizes and selects the geological materials requested of it, parsing and interpreting geological scenes in tens to hundreds of seconds with very limited computing resources. Performance in autonomously selecting the most desired target material over the last 2.5 kilometers of driving into previously unexplored terrain exceeds 93% (where ~24% is expected without intelligent targeting), and all observations resulted in a successful geochemical observation. The system has substantially reduced lost time on the mission and markedly increased the pace of data collection with ChemCam. AEGIS autonomy has rapidly been adopted as an exploration tool by the mission scientists and has influenced their strategy for exploring the rover's environment.
Journal information: Science Robotics
© 2017 Phys.org





















