Researchers develop two-legged robot that walks like an animated character
When Walt Disney created Mickey Mouse, he didn't give much thought to how he might bring his character to life in the real world. But robotics now puts that possibility within reach, so Disney researchers have found a way for a robot to mimic an animated character's walk.
Beginning with an animation of a diminutive, peanut-shaped character that walks with a rolling, somewhat bow-legged gait, Katsu Yamane and his team at Disney Research Pittsburgh analyzed the character's motion to design a robotic frame that could duplicate the walking motion using 3D-printed links and servo motors, while also fitting inside the character's skin. They then created control software that could keep the robot balanced while duplicating the character's gait as closely as possible.
"The biggest challenge is that designers don't necessarily consider physics when they create an animated character," said Yamane, senior research scientist. Roboticists, however, wrestle with physical constraints throughout the process of creating a real-life version of the character.
"It's important that, despite physical limitations, we do not sacrifice style or the quality of motion," Yamane said. The robots will need to not only look like the characters, but move in the way people are accustomed to seeing those characters move.
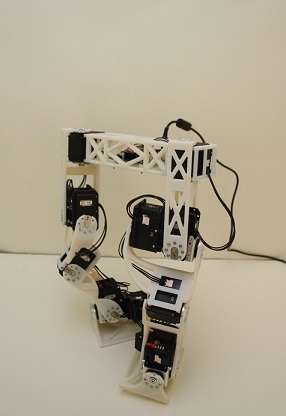
Yamane and Joohyung Kim of Disney Research Pittsburgh and Seungmoon Song, a Ph.D. student at Carnegie Mellon University's Robotics Institute, focused first on developing the lower half of such a robot.
"Walking is where physics matter the most," Yamane explained. "If we can find a way to make the lower half work, we can use the exact same procedure for the upper body."
They will describe the techniques and technologies they used to create the bipedal robot at the IEEE International Conference on Robotics and Automation, ICRA 2015, May 26-30 in Seattle.
Compromises were inevitable. For instance, an analysis of the animated character showed that its ankle and foot had three joints, each of which had three degrees of freedom. Integrating nine actuators in a foot isn't practical. And the researchers realized that the walking motion in the animation wasn't physically realizable - if the walking motion in the animation was used on a real robot, the robot would fall down.
By studying the dynamics of the walking motion in simulation, the researchers realized they could mimic the motion by building a leg with a hip joint that has three degrees of freedom, a knee joint with a single degree of freedom and an ankle with two degrees of freedom.
Because the joints of the robot differ from what the analysis showed that the animated character had, the researchers couldn't duplicate the character's joint movements, but identified the position trajectories of the character's pelvis, hips, knees, ankle and toes that the robot would need to duplicate. To keep the robot from falling, the researchers altered the motion, such as by keeping the character's stance foot flat on the ground.
They then optimized the trajectories to minimize any deviation from the target motions, while ensuring that the robot was stable.
More information: www.disneyresearch.com/wp-cont … -Character-Paper.pdf
Provided by Disney Research




















