Submersible and shape-changing robots developed for Fukushima inspection
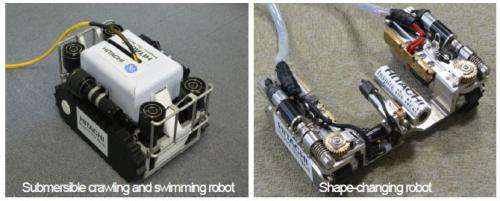
Hitachi and HGNE today announced the development of a submersible crawling and swimming robot (crawler) and a shape-changing robot (crawler) which freely modify shape or posture to avoid obstacles even in narrow spaces to remotely explore wide areas. Hitachi and HGNE have developed these robots to conduct various investigations ahead of the remote equipment to be developed under the project supported by the Agency for Natural Resources and Energy, Japan, to remove the fuel at the Fukushima Daiichi Nuclear Power Plant. The submersible crawling and swimming robot and the shape-changing robot can move in water and on land, respectively, in areas where human entry is difficult due to narrow spaces or obstacles, and can be used to investigate leakage points in coolants as well as the state of fuel.
At Fukushima Daiichi Nuclear Power Plant, water is continuously fed into the reactor pressure vessel for cooling however some of the coolant water leaks from reactor pressure vessel into the primary containment vessel, and then into the basement levels of the power plant, becoming retained water containing radioactive substances. The retained water undergoes purification to remove the radioactive substances and salts, and is stored in tanks, however to reduce the amount of retained water, it is necessary to identify and repair the points of leakage in the power plant.
Dealing with such situations, Hitachi and HGNE have developed a submersible crawling and swimming robot which can move both horizontally in water as well as vertically against a wall, and a shape-changing robot which can travel within pipes with a diameter of 100mm as well as stably traverse uneven surfaces. These two robots will be applied in the investigative equipment to be used in preparation for the removal of the fuel from the Fukushima Daiichi Nuclear Power Plant as part of the project supported by the Agency for Natural Resources and Energy, Japan.
Details of the mobile equipment developed are as below.
(1) Submersible crawling swimming robot (crawler)
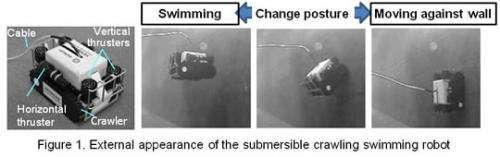
The submersible crawling swimming robot is for investigating submersed environments within the power plant, and can be used to investigate underwater leakage points of the retained water within a nuclear power plant. Figure 1 shows there external appearance of the robot, and Table 1 gives the main specifications. A feature of this robot is the use of six thrusters (4 vertical, 2 horizontal) to enhance free movement in water, and one set of crawlers to achieve both crawling and swimming movement. Through the crawling movement, the robot can not only run along the bottom of a water pool but can also change posture to avoid obstacles while swimming and after swimming, to move along a wall through suction. As shown in Figure 1, Hitachi and HGNE assessed the mobility performance of this robot in water and confirmed that the robot could float from the floor, swim, press against a wall and change its posture 90°, move stably along the wall using suction.
(2) Shape-changing robot (crawler)
There are areas within the nuclear power plant where the radiation levels are high, and in order to insert the equipment in the target section, it is necessary to minimize the size of the opening in the primary containment vessel. At the same time, as it is difficult to achieve stable locomotion of small mobile equipment, issues existed as in how to overcome locomotion in more rugged environments. A shape-changing robot capable of changing its shape to pass through narrow spaces was developed based on crawling equipment which can stably run using two compact crawlers. Figure 2 shows there standard external appearance of the robot and its altered shape, and Table 2 gives the main specifications.
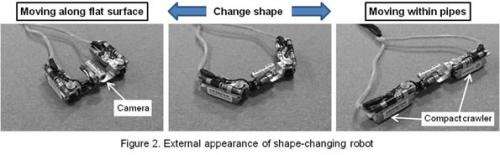
The shape-changing robot is composed of three joints on the main body and the two compact crawlers. To change shape, the crawler is rotated 90° in relation to the main body. The posture of the robot can be freely chosen from between an open rectangle posture where the crawlers are aligned along the side of the main body, or a single line posture where the main body and crawlers are configured in line, enabling both stable locomotion of flat surfaces as well as moving through narrow pipes. Using the robot in Figure 2, pilot tests simulating the environment within the primary containment vessel of a nuclear power plant were conducted. The results confirmed that the robot could travel through pipes with a diameter of 100mm, travel over flat gratings with a lattice dimension of 25 mm × 90 mm, as well as stably traverse uneven surfaces.
-
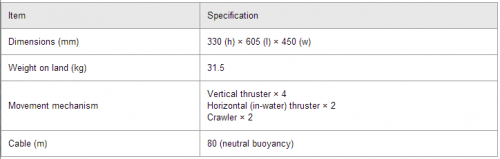
Table 1. Specifications of submersible crawling swimming robot -
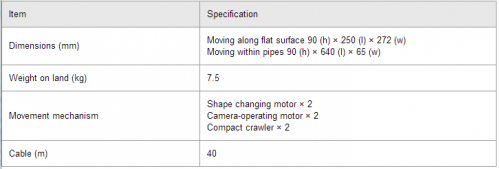
Table 2. Specifications of shape-changing robot
Details of these two robots will be presented at the Annual Meeting of the Atomic Energy Society of Japan (ASEJ), to be held from 26th to 28th March at the Tokyo City University, Tokyo, Japan.
Provided by Hitachi




















