Development of single-passenger mobility-support robot "ROPITS" for autonomous locomotion on footpaths
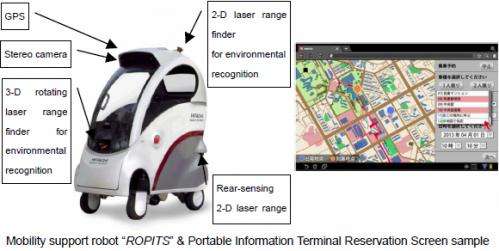
Hitachi, Ltd. today announced the development of a mobility-support robot "ROPITS" equipped with a "specified arbitrary point autonomous pick-up and drop-off function" that can autonomously navigate to a point specified by a portable information terminal. The "specified arbitrary point autonomous pick-up and drop-off function" enables autonomous locomotion to a specified arbitrary point identified on a map on the Reservation/ Operation Screen of a portable information terminal. Using this function, ROPITS is able to autonomously go and pick-up a passenger at any desired pick-up point on a footpath, or deliver a passenger to a specified arbitrary destination.
The use of human symbiotic robots is expected to contribute to the establishment of a low carbon society for the achievement of a sustainable society, as well as to support the needs of a future society with a high proportion of elderly people. ROPITS was developed to support the short-distance transportation of the elderly or those with walking difficulties, and is a single-passenger robot which can autonomously navigate pedestrian space within communities. In order to raise the level of autonomous travel technology to a practical level, Hitachi has been participating in the Mobility Robot Experiment Special District ("Tsukuba Special District") in the City of Tsukuba, in Ibaraki prefecture since 2011. Through pilot tests conducted on real-world footpaths, research has been conducted to improve usability and convenience as a transport support service, reliability in autonomous travel, as well as compatibility surveys with actual pedestrians.
This time, to improve usability and convenience as a transport support service, Hitachi has developed the single-passenger mobility-support robot ROPITS with "specified arbitrary point autonomous pick-up and drop-off function," which can be summoned from anywhere within the town using the map in the portable information terminal.
Features of the technology developed are as below:
- Highly accurate indoor / outdoor environment self-position estimation. Conventionally, a geometric environment map for robot locomotion is created by various sensors mounted on ROPITS such as GPS, laser range finder, gyro-sensor, encoder, to gather information such as distance between objects in the environment, latitude, longitude, altitude, etc. during locomotion. Altitude information collected from such sensors, however, had a wide error margin. Thus, for positioning, greater accuracy in altitude data was required. To address this issue, Hitachi employed information from such as the electronic maps of the Geospatial Information Authority of Japan which contain altitude information, as well as a high precision RTK-GPS. By merging the independently collected latitude, longitude and altitude information on the same coordinate system, a 3-dimensional geometric environment map was created which represented the actual geometric environment. Further, in order to create a footpath map for the extensive area of the Tsukuba Special District, a high precision map fusion function developed by Hitachi was used, to create a geometric environment map for the approximately 18 km of footpaths in the Tsukuba Special District. As a result of this map, ROPITS is able to accurately determine coordinates and move. Thus, users by simply specifying a point on the electronic map, can move within the entire town area of the Tsukuba Special District. Further, as the footpath altitude information is included, ROPITS is able to move through pedestrian space of differing heights such as different floors within a building or raised intersections.
- Obstacle-avoidance technology by 3-dimensional environment sensing using combination of sensors. ROPITS is equipped with a laser range finder and a stereo-camera. By combining the 3-dimensional geometric information obtained, it is possible to detect pedestrians or unevenness in the footpath without amiss. As a result, ROPITS can smoothly maneuver footpaths which may contain various sorts of obstacles, maintaining speed with keeping distance while avoiding obstacles in wide areas, dropping speed in narrow areas, and automatically stopping when in close proximity of a pedestrian.
- Stable movement using active suspension. In mobility-support transport systems, passenger safety and comfort is critical. In ROPITS, suspension for shock absorption and an actuator to freely control the up/ down position of the wheel were positioned in tandem. As a result, the body is constantly maintained in a level position (horizontal state) and any undulations and other unevenness in the footpaths can be safely maneuvered without losing balance.
Details of this technology will be presented together with demonstrations at The Robotics and Mechatronics Conference 2013, ROBOMEC 2013, sponsored by the Robotics and Mechatronics Division of The Japan Society of Mechanical Engineers, to be held in the Tsukuba Special District from 22nd to 25th May 2013.
Source: Hitachi



















