January 3, 2012 report
Cat-brushing robot draws all signs of contentment (w/ video)
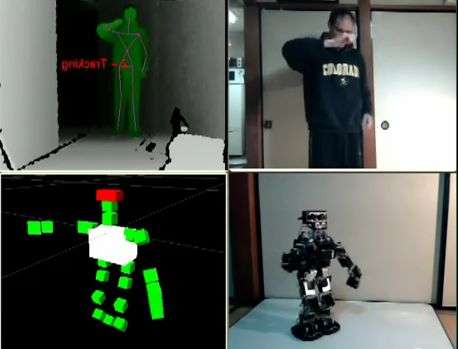
(PhysOrg.com) -- Cat-grooming robot? It can happen, and it has, with software engineer Taylor Veltrop’s show of all he can do with the research robot Nao, along with the motion-sensing Kinect device, a head-mounted display (HMD), Wii remotes, and treadmill. The Tokyo-based Veltrop has a video out that demonstrates how Nao, a humanoid robot, is able to take a brush and gently apply it to the cat. With the exception of being bopped on the head, the cat indicates that it is a pleasant experience.
Kinect tracks Veltrop’s movements. When he bends or walks forward, for example, the robot obeys. The HMD controls the robot’s head and neck. The Wiimotes are used for each hand. With user on treadmill, Nao is navigated to walk forward and begin brushing the cat. The robot’s movements match the task, indicating adequate control. When the job is complete, Nao backs away, sits down and waves goodbye to the cat.
To those who are not into robotics, all that gadgetry and pupeteering for a few brush strokes might seem not only over the top but an utter waste of time. Robotics enthusiasts think otherwise.
Numerous blogger postings are commenting on the cat-brushing demo to point out that it is not so much what Nao did but how Nao did it and at what reasonable cost.
The cat-grooming demo is but one of many demos involving Nao and its many scenarios. The Nao humanoid robot, depending on edition, has 21 to 25 degrees of freedom and has ultrasonic sensors that control its positioning and stability.
From Paris-based Aldebaran Robotics, Nao has become a popular robot for use in research. As iProgrammer comments, “The Nao robot is a mega toy just waiting to happen.”
Earlier this year, Aldebaran Robotics announced that they will make a “significant” part of their source code as open source. aimed at growing a stronger developer community and improving the robot's capabilities.
In Aldebaran's Nao Developer Program, successful applicants get the latest NAO with SDK, access to the community website and special access to Aldebaran Robotics source code and support. Veltrop is a member of the Nao Developer Program.
Another telling statement came earlier this year was from Bruno Maisonnier, Aldebaran founder and CEO: “We want to share our middleware, our core communication library, our cross-platform build tools and other essential modules with researchers, developers and emerging projects in humanoid robotics."
What's more, the cat-grooming video interests enthusiasts because of what it suggests about the future use of telepresence.
In an effort to put Veltrop’s invention into the telepresence perspective, the ExtremeTech site asks to imagine that, if you are on the road, you could take an HMD and Wiimote and pat your cat remotely.
The Sebastian Anthony posting adds a prediction that “It won’t be long until every household has a cheap, teleoperated robot that can be logged into remotely.”
More information: taylor.veltrop.com/
© 2011 PhysOrg.com





















