October 10, 2011 weblog
Berkeley robot uses tiny, spiny toes to climb cloth
(PhysOrg.com) -- Scientists working in robotics know that nature holds the best ideas for making robots that can perform with speed, agility, and efficiency. At University of California, Berkeley, the Biomimetic Millisystems Lab is at the forefront of mimicking nature. Its lab mission is “to harness features of animal manipulation, locomotion, sensing, actuation, mechanics, dynamics, and control strategies," in its work with small lightweight millirobots.
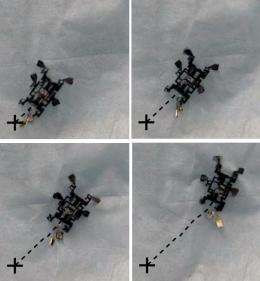
The lab's creation, CLASH, is the newest member of its robotic creatures, and this one moves vertically up cloth.
Ten centimeters long, the 15-gram CLASH moves up cloth fast in an insect-like scurrying motion. The motor in CLASH powers the legs and drives its swift gait frequency.
According to the Biomimetic Millisystems Lab site, the robotic device "is capable of climbing a loose cloth surface at 15 cm per second using a simple passive claw mechanism and a coupled in-plane leg drive system."
Each leg is connected to the single motor through a series of linkages.
A point of design interest about CLASH is centered on the gripping and climbing technique the team devised, where tiny spikes on the robit's feet grip into loose fabric and let the bot climb. The electronics and battery are configured into the tail of the robot, which adds balance.
The CLASH newcomer belongs to the lab's family of "Ambulating Robots.” They make a case for the value of legged systems rather than wheeled systems. Key performance advantages in legged systems is because the feet are not continually in contact with the ground, which makes legged robots better able to cross challenging terrain, they note. Perhaps the most interesting advantage, say the researchers, is in dynamic behavior seen in nature. "Many legged animals exhibit dynamically, self-stabilizing behavior. That is, the passive mechanical properties of the systems are tuned to naturally reject disturbances which might otherwise cause unstable behavior in the system."
Last month the Berkeley team of P. Birkmeyer, A. G. Gillies, and R. S. Fearing presented "CLASH: Climbing Vertical Loose Cloth" at IROS 2011 (International Conference on Intelligent Robots and Systems) in San Francisco.
The lab's work on CLASH is not done yet. According to a report in IEEE Spectrum, they want to get CLASH to crawl horizontally, and they want CLASH to turn.
© 2011 PhysOrg.com



















