Feelers for insect robots
Many insects sense their way around their immediate surroundings by means of moving feelers. Now research scientists have applied this active spatial recognition of objects to create a new mechatronic type of sensor. It could soon be in use as an orientation aid for mobile robots.
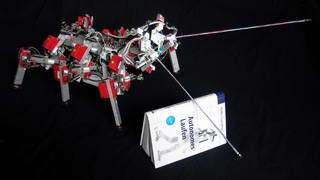
Image: Like an insect, mobile robot Tarry uses its feelers to identify the spatial position of obstacles. © V. Dürr/Uni Bielefeld
When people have to walk through an unfamiliar room in the dark they automatically stretch out their arms and rely on their sense of touch. They can reduce the risk of bumping into an obstacle by additionally moving their arms. Insects have optimized this principle: With long feelers making circular movements they investigate their surroundings and are able to negotiate even extremely difficult terrain. This is how stick insects make their way through the branches of trees, for example.
Research scientists at the Fraunhofer Institute for Factory Operation and Automation IFF in Magdeburg and the University of Bielefeld have developed a touch-sensor incorporating the same principle. It delivers more information about its environment than conventional touch-sensors and is more robust and less expensive than optical measurement techniques which use cameras.
A prototype of the artificial feeler has been installed on an autonomously running insect robot at the University. Two motors move the sensor-rod in an oval-shaped circular path, with an acceleration sensor on its freely oscillating tip. Unlike conventional touch-sensors which only react to pressure on the tip, the feeler can be used as a sensor along the whole of its length.
Depending on the point at which the feeler touches an object – perhaps in the middle or in the front third – the sensor measures a different oscillation frequency at the tip. “If the obstacle is close to the sensor, the frequency is high. If it is far away, the tip oscillates more slowly,” states Oliver Lange of the IFF, explaining the measurement principle. “It’s like a ruler which is held down on a table at one end and can vibrate freely at the other.” The frequency and control signals of the motors – i.e. the angle of the rod at the time of contact – indicate the position of the obstacle in the room. “With a feedback loop the sensor could even change its approach after an initial contact and search the area in a certain corner more precisely,” adds Lange. “This would have the advantage that large amounts of data would only be created if an encounter takes place.”
The prototype of the feeler is exactly tailored to the insect robot in terms of reach and movement. But the principle, on which a patent is pending, can easily be transferred to other applications and adapted to the particular requirements in each case, Lange is convinced. “Mobile robots could be equipped with the sensor, for instance, because many optical sensors and camera systems fail in dusty or dirty environments.”
Source: Uni Bielefeld

















