'Robosnail' crawls up vertical walls
A team of scientists from the Massachusetts Institute of Technology has developed a robotic snail that can crawl on vertical walls and traverse ceilings. ‘Robosnail’ was developed to explore and demonstrate mathematical theories to explain a snail’s movement and ability to adhere to walls at all angles.
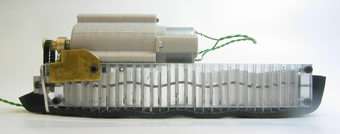
Image copyright: MIT/Brian Chan
While the creation of the robotic snail was experimental, the developers hope it will eventually find applications in the robotics industry, Nature News has reported.

In order to propel itself, a terrestrial snail utilises the contracting ability of its lone foot. This foot is glued to the surface by way of a sticky slime secreted by the snail. The snail contracts its foot muscle from behind, pushing the rest of it forward. The film of slime keeps the snail glued to the wall and prevents it from sliding back. As the compression reaches the front of the foot, the snail stretches out and moves slightly ahead of its original position. Thus the snail is able to move slowly ahead at any angle.
The engineers simulated this process. They created an artificial gastropod with five movable segments on its underside. Each segment was moved along a track on the mechanical mollusk’s body. After all these segments moved, the entire body of the robot snail also moved forward and each segment returned to its original position. Robosnail was then tested on a tilting platform coated with 1.5 millimetre-thick layer of slime made from Laponite. When the team increased the gradient of the platform, the snail continued its movement - even when upside down. The engineers published their findings in the November issue of Physics of Fluids.
The team has also developed mathematical theories to determine the optimum slime and weight levels for mechanical snails. These factors are vital to determine Robosnail’s ability to stay glued to its surface. Anette Hoso, the lead engineer of the Robosnail team, says the next generation of robotic snails will be faster and easier to manipulate.
Reference:
Chan B., Balmforth N. J., Hosoi A. E., et al. Phys. Fluids, 17. 113101 (2005).
Copyright 2005 PhysOrg.com















