Scientists Propose Paradigm Shift In Robotic Space Exploration
Just ask any geologist. If you're studying the history of a planet and the life forms that may have lived on it, the really good places to look are rugged terrains like canyons and other areas where water, igneous activity, wind, and seismic rumblings have left their respective marks. Flat is not so good.
But when it comes to exploring other worlds, like Mars, the strategy for ground-based reconnaissance thus far has been to land in relatively smooth places so the spacecraft won't slam into something vertical as it touches down or as it rolls to a stop in its protective airbags.
In the cases of the Mars landings--and all soft landings on other planets and moons, for that matter--flat is definitely good.
To address this disconnect, a team of interdisciplinary scientists from the California Institute of Technology, the University of Arizona, and the U.S. Geological Survey has unveiled a proposal to make core changes in the robotic exploration of the Solar System.
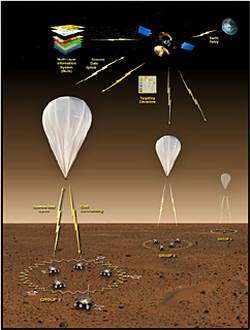
In addition to spaceborne orbiters, the "new paradigm" would involve sending orbiter-guided blimps (or other airborne agents) carrying instruments such as optical and thermal cameras, ground-penetrating radar, and gas and humidity sensors to chosen areas of a planet, as well as using herds of small, robotic, ground-based explorers.
The ground explorers would communicate with the airborne and/or spaceborne agents, coupled with innovative software for identification, characterization, and integration of various types of spatial and temporal information for in-transit comparative analysis, hypothesis formulation, and target selection.
This would lead to a "tier-scalable perspective," akin to the approach used by field geologists to solve a complicated geological puzzle.
Writing in an upcoming issue of the journal Planetary and Space Science, the researchers propose "a fundamentally new scientific mission concept for remote planetary surface and subsurface reconnaissance."
The new approach will be cost-effective, in that it can include greater redundancy and thus greater assurance of mission success, while significantly allowing unconstrained science-driven missions to uncover transient events (for example, evidence of liquid water) and possible signs of life on other worlds.
"We're not trying to take anything away from the successful landings on Mars, Venus, and Titan, nor the orbital-based successes to most of the planetary bodies of the solar system," says Wolfgang Fink, a physicist who is serving a multiyear appointment as a visiting associate at Caltech.
"But we think our tier-scalable mission concept will afford greater opportunity and freedom to identify and home in on geological and potential astrobiological 'sweet spots.'"
The new paradigm is spearheaded by Fink and by James Dohm, a planetary geologist in the Department of Hydrology and Water Resources at the University of Arizona. The team effort includes Mark Tarbell, who is Fink's associate in Caltech's Visual and Autonomous Exploration Systems Research Lab; Trent Hare of the U.S. Geological Survey office in Flagstaff; and Victor Baker, also of the University of Arizona.
"The paradigm-changing mission concept is by no means accidental," Dohm explains. "Our interdisciplinary team of scientists has evolved the concept through the profound realization of the requirement to link the various disciplines to optimally go after prime targets such as those environments that have high potential to contain life or far-reaching geological, hydrological, and climatological records."
Fink, for his part, is an expert in imaging systems, autonomous control, and science analysis systems for space missions. Dohm is a planetary and terrestrial field geologist, who, based on his experience, has a keen sense of how and where to study a terrain, be it earthly or otherworldly.
Dohm, who has performed geological investigations of Mars from local to global scales for nearly twenty years, says the study of the geology of other planets has been fruitful yet frustrating. "You're not able to verify the remote-based information in person and uncover additional information that would lead to an improved understanding of the geologic, water, climate, and possible biologic history of Mars.
"Ideally, you'd want to look at remote-based geological information while you walked with a rock hammer in hand along the margin that separates a lava flow from putative marine deposits, exploring possible water seeps and moisture embankments within the expansive canyon system of Valles Marineris that would extend from Los Angeles to New York, characterizing the sites of potential ancient and present hydrothermal activity, climbing over the ancient mountain ranges, gathering diverse rock types for lab analysis, and so on.
"We think we've devised a way to perform the geologic approach on other planets in more or less the way geologists do here on Earth."
Even though orbiting spacecraft have successfully collected significant data through instrument suites, working hypotheses are yet to be confirmed.
In the case of Mars, for example, it is unknown whether the mountain ranges contain rock types other than volcanic, or whether sites of suspected hydrothermal activity are indeed hydrothermal environments, or whether the most habitable sites actually contain signs of life. These questions may be addressed through the "new paradigm."
The interdisciplinary collaboration provides the wherewithal for thinking out of the box because the researchers are, well, out of the box. "We're looking at a new way to cover lots of distance, both horizontally and vertically, and new, automated, ways to put the gathered information together and analyze it-perhaps before it even comes back to Earth," Fink says.
Just how innovative would the missions be? The tier-scalable paradigm would vary according to the conditions of the planet or moon to be studied, and, significantly, to the specific scientific goals.
"I realize that several missions in the past have been lost during orbital insertion, but we think that the worst perils for a robotic mission are in getting the instruments to the ground successfully," Fink says. "So our new paradigm involves missions that are not crippled if a single rover is lost."
In the case of Mars, a typical mission would deploy maneuverable airborne agents, such as blimps, equipped with existing multilayered information (geologic, topographic, geomorphic, geophysical, hydrologic, elemental, spectral, etc.) that would acquire and ingest information while in transit from various altitudes.
While floating and performing smart reconnaissance (that is, in-transit analysis of both the existing and newly acquired spatial and temporal information in order to formulate working hypotheses), the airborne agents would migrate toward sweet spots, all the while communicating with the orbiter or orbiters.
Once the sweet spots are identified, the airborne agents would be in position to deploy or help guide orbiter-based deployment of ground-based agents for further analysis and sampling.
"Knowing where you are in the field is extremely critical to the geologic reconnaissance approach," Dohm says.
"Thanks to the airborne perspective and control, this would be less of a concern within our tier-scalable mission concept, as opposed to, for example, the case of an autonomous long-range rover on Mars that is dependent on visible landmarks to account for its current location," Fink adds.
The robotic ground-based agents would be simpler and smaller than the rovers currently being sent to Mars. Though not necessarily any more robust than the current generation, the agents would be able to take on rocky and steep terrains simply because there would be several with varying degrees of intelligence and thereby, would be somewhat expendable. If a single rover turned over on a steep terrain, for example, the mission would not be lost.
The stationary sensors would be even more expendable and could collect information that can be transmitted back to the airborne units and orbiter or orbiters for comparative analysis of the spatial and temporal information for redeployment if the units are mobile, or for additional deployment, such as placing a drill rig in a prime sweet spot in order to sample possible near-surface groundwater or even living organisms.
And these are just the ideas for planets such as Mars. The researchers also have multi-tier mission plans for other planets and moons, where the conditions could be much more harsh.
In the case of Titan, one of Saturn's moons with an atmosphere one and a half times as thick as Earth's, autonomously controlled airships would be ideal for exploration, rendering Titan perfectly suited for deployment of a three-tiered system consisting of orbiters, blimps, and both mobile and immobile ground-agents, especially in light of the even longer communication time lag than in the case of Mars.
On Io, the extremely volcanically active atmosphere-void moon of Jupiter, in contrast, the orbiter-guided deployment of mobile ground-agents and immobile sensors would be a productive way of performing ground-based reconnaissance, capturing and studying active volcanism beyond Earth. In this case, the three-tiered system of spaceborne-, airborne-, and ground-level would be reduced to the two tiers of spaceborne- and ground-level.
The advantages of redundancy and data compilation would still provide huge operational advantages on Io: if some of the ground-agents are lost to volcanic hazards, for example, those that remain can still identify, map out, and transmit back significant information, thus rendering the overall mission a success. The tier-scalable concept is equally applicable to investigating active processes on Earth that may put scientists in harm's way, including volcanism, flooding, and other hazardous natural and human-induced environmental conditions.
The researchers are already in the test-bed stage of trying out advanced hardware and software designs. But Fink says that much of the technology is already available, and even that which is not currently available (the software, primarily) is quite attainable. Further design, testing, and "ground-truthing" are required in diverse environments on Earth.
Fink and Dohm envision field camps where the international community of scientists, engineers, mission architects, and others can design and test optimal tier-scalable reconnaissance systems for the various planetary bodies and scientific objectives.
"After all, the question is what do you do with your given payload," Fink says. "Do you land one big rover, or would you rather deploy airborne agents and multiple smaller ground-agents that are commanded centrally from above, approximating a geologist performing tier-scalable reconnaissance?
"We think the 'tunable' range of autonomy with our tier-scalable mission concept will be of interest to NASA and the other agencies worldwide that are looking at the exploration of the Solar System."
The title of the Planetary and Space Science article is "Next-generation robotic planetary reconnaissance missions: A paradigm shift."
Copyright 2005 by Space Daily, Distributed United Press International















