Layer 2-based wireless relay network for robot control under non-line-of-sight environments

Remote control of field robots usually becomes difficult when the robots go beyond obstacles, such as thick walls, buildings, forests, or mountains, due to loss of line-of-sight radio propagation. Then the telemetry signals also get lost.
Conventional approaches have employed ad-hoc and multi-hop communication techniques in order to cope with the above problem, where a relay route via other robots helps to avoid disconnection from the target robot. However, the technique was originally designed for wireless Internet so that it is basically not suitable for robot control, that is, the control link is momentarily disconnected and the control stops every time the relay route changes.
The research group developed a layer 2-based wireless relay communication technology for the command/control and telemetry signals of a remotely-operated target robot out of the line-of-sight via other robots (Fig. 1).
The technology enables continuous operation of a robot out of the line-of-sight with simultaneous and redundant transmission of command/control and telemetry signals via multiple relay routes through other robots. We reconstructed the communication scheme from conventional ones such as that of wireless LAN and realized a new one dedicated to robot control on a relay transmission basis. The new scheme also employs a time-division multiple access (TDMA) control protocol to share the communication media among different robot terminals with small response latency and low packet collision probability, which gives an efficient use of time resource and constant freshness of the command/control and telemetry data.

The conventional communication schemes, mainly designed for Internet access, mostly carry out search and calculation to select the best relay route to transmit data, assuming unspecified relay nodes with small mobility. The new scheme removes the above procedures and implements a simplified procedure in layer 2, where the target robot receives the command/control and telemetry data via all of the possible routes with different TDMA slots, assuming a small number of specified relay nodes with high mobility. The target robot simply selects a signal with the best quality among those signals. With this technique, the response latency through one relay robot has been improved to about 50 msec, compared to that of conventional schemes, the latency of which varies from several 10 msec to several 100 msec depending on the communication traffic conditions. Moreover, our technology gives continuity of relay connection even with the frequent and random change of the relay route due to the movement of the robot, so that we can avoid momentary disconnection of the control link, which ensures the stability of the control of the target robot.
Fig.2 and Fig.3 show a series of prototypes of the wireless modules and the specifications, respectively, which uses 920 MHz band for both command/control and telemetry signals. NICT and AIST successfully demonstrated the validity of the technology by controlling a UGV in operation beyond the line-of-sight. A multi-rotor drone hovering at an altitude of 20-30m served as an aerial relay robot to connect the UGV to its operator. This is the first time that not only control of a UGV via a flying drone but also continuity of the connection even with the frequent and random change of the relay route was achieved in the world.
In the demo, the target robot to be controlled was a slow-moving UGV. In the next demo, we will try to replace the UGV with a multi-rotor drone that moves much faster.
The developed technology would be useful not only for robots in operation inside or close to buildings in disaster situations or in security applications, but also for aerial robots flying at low altitude for monitoring and transportation in mountain areas. It would also be the basis for the deployment of a cooperative and autonomous wireless network with multiple robots to make wireless control more reliable and safe.
-
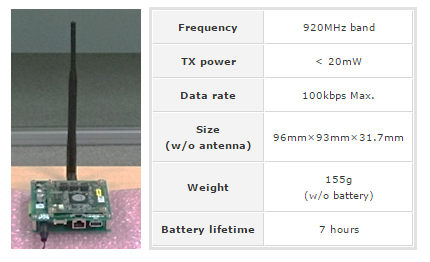
Fig. 3 Specifications. (Common for operator and relay/target robot modules). Credit: Advanced Industrial Science and Technology -
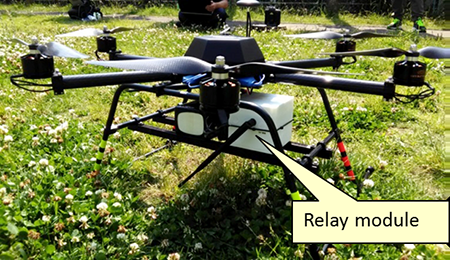
Fig. 4 Relay module installed on a multi-rotor drone. -
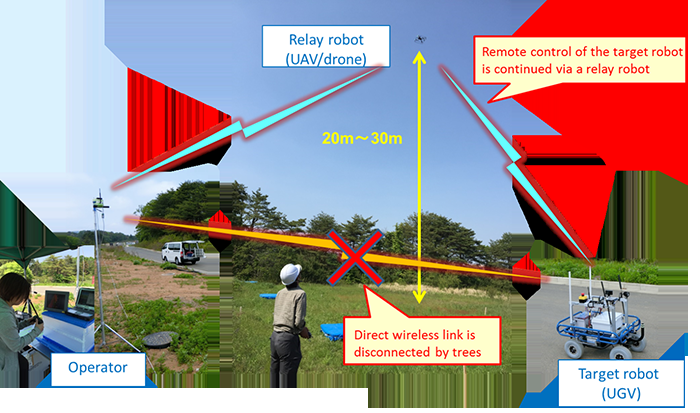
Fig. 5 Field demonstration test. A UGV beyond the line-of-sight from the operator was successfully controlled and monitored via a hovering drone. (May 18 and June 2, 2016 at Aobayama Campus, Tohoku University). Credit: Advanced Industrial Science and Technology
Provided by Advanced Industrial Science and Technology