Virtual, squishy creatures evolve to run using evolutionary algorithms
A research team led by Cornell University's Creative Machines Lab has created a computer algorithm that can be used to witness virtual creatures evolving their squishy, muscle-like features in order to teach themselves to walk.
The team incorporated concepts from developmental biology and how nature builds complex animals – from jellyfish to jaguars. The result is an array of bizarre, simulated robots that evolve a diverse series of gaits and gallops.
The paper describing these soft-bodied robots will appear in Proceedings of the Genetic and Evolutionary Computation Conference and is titled "Unshackling Evolution: Evolving Soft Robots With Multiple Materials and a Powerful Generative Encoding."
Lead author Nick Cheney, a Cornell graduate student, will present the paper at the July conference in Amsterdam. Robert MacCurdy, also a graduate student at Cornell, contributed to the work, as well as Jeff Clune, assistant professor at the University of Wyoming and former visiting scientist at Cornell.
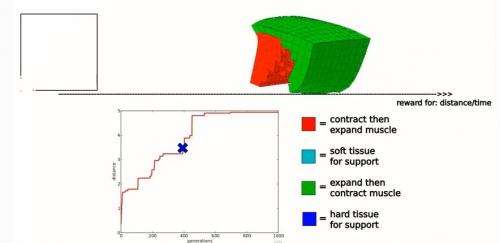
The video shows evolution in action: A creature evolves into a galloping, soft robot over 1,000 generations. While 1,000 generations is relatively short by natural evolution standards, it is enough to demonstrate the power of evolution to create counterintuitive designs, according to the researchers.
In the paper, they describe how they challenged human engineers to design robots made of these soft and hard materials. The human efforts paled in comparison to the designs resulting from evolution.
More information: Download the paper: jeffclune.com/publications/2013_Softbots_GECCO.pdf
More than a decade ago, Cornell professor Hod Lipson led a project called Golem that similarly evolved robots, and he later built them with a 3-D printer. That video and others from the Creative Machines Lab can be viewed at creativemachines.cornell.edu/videos .
Provided by Cornell University



















