June 3, 2012 report
BaTboT is up for imitating smart bat maneuvers

(Phys.org) -- Robotics researchers in Spain and the U.S. are studying bats for their design work on drones. Bat wings are highly articulated, with skeletons similar to those of human arms and hands. The researchers have built a drone that mimics the way a bat changes its wing shape in flight. Bats achieve an “amazing” level of maneuverability, says a researcher, mainly because of their capacity of changing wing morphology during flight. Specifically, the "Batbot" replicates the way a bat changes the profile of its wing between the downstroke and upstroke. By folding wings toward their bodies on the upstroke, bats use 35 percent less energy and reduce aerodynamic drag, according to researchers at Brown.
The design is said to be encouraging, as an example of how robot construction can move from rigid components toward bionic systems made from softer materials and artificial muscles.
The interest in bats is because of the way bats change the shape of their wings, which has potential for improving the maneuverability of these air devices. Julian Colorado and colleagues at the Polytechnic University of Madrid, Spain and at Brown University in Providence, Rhode Island, built the drone with an end goal in mind—more agile, autonomous robots making more agile moves than can fixed wing aircraft.
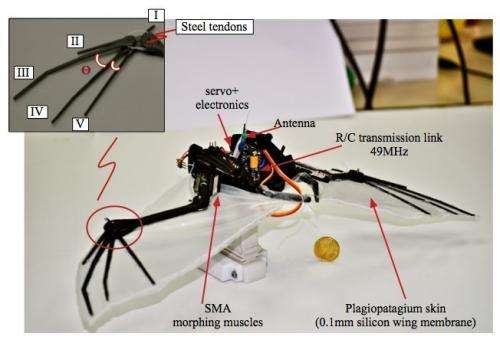
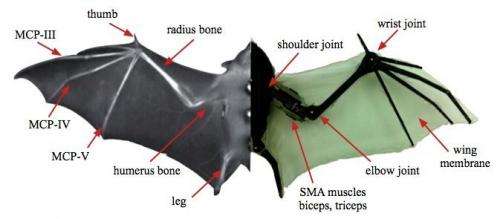
Colorado said that trying to mimic that level of functionality requires analysis of bat flight and novel technologies, ranging from design to control issues. Colorado’s team refers to their device officially as the “BaTboT” robot. They make use of shape memory alloys as muscle like actuators, behaving as biceps and triceps along the wing-skeleton structure of the robot. The wing extends and contracts under the control of the shape-memory alloy wires that switch between two shapes when different currents are applied. The wires, between the "shoulder" and "elbow" of the robot, rotate the elbow, pulling in the "fingers" to slim the wing profile on the upstroke. This contracts and extends the wings in a similar way to the biological counterpart, said Colorado.
The device’s wingspan was inspired by a specific type of bat, the grey-headed flying fox, the largest bat in Australia.
The US military partly funded this research. The paper presenting the design of this bat-like air vehicle is “Biomechanics of smart wings in a bat robot morphing wings using SMA actuators.” Authors are J Colorado, A Barrientos, C Rossi and K S Breuer. A professor of engineering, Breuer is from the School of Engineering at Brown and he has been studying bats for over ten years. “There is growing interest in the energy cost of flight,” according to Breuer. Understanding bat flight can help further the continued development in small, unmanned flying vehicles
“Bats have evolved with truly extraordinary aerodynamic capabilities that enable them to fly in dense swarms, to avoid obstacles, and to fly with such agility that they can catch prey on the wing, maneuver through thick rainforests and make high speed 180 degree turns,” according to notes from Brown University’s notes on Bat Flight Research.
More information:
sites.google.com/a/brown.edu/f … /bat-flight-research
www.disam.upm.es/~jdcolorado/BAT/BaTboT.html
© 2012 Phys.Org


















