Robotically steered flexible needles navigate in tissue
Robotically steering flexible needles can reach their intended target in tissue with sub-millimetre level accuracy. This has been demonstrated by the doctoral research of Momen Abayazid, who is affiliated with the research institute MIRA of the University of Twente. An major advantage of steering flexible needles is that one can avoid obstacles or sensitive tissues and can re-orient the path of the needle in real time as you insert the needle.
During many diagnostic and therapeutic procedures a needle is inserted into soft tissue, such as during biopsies, or inserting radioactive seeds in order to combat prostate cancer. In many of these operations the accurate positioning of the needle is of the utmost importance. In general, rigid needles with a relatively large diameter are used in these procedures. However, the drawback of these needles is that they cannot be maneuvered when inserted into tissue and hence cannot avoid any obstacles. In addition, the tissue and organs deform during needle insertion. As a result, the needle often misses its target.
Flexible needles with an asymmetric tip
The University of Twente is has developed a robot-assisted system for steering flexible needles with an asymmetric tip. Such a needle naturally bends when inserted into tissue due to its asymmetric tip. By performing a sequence of insertions and rotations, one can steer the needle in complex three-dimensional paths. The needle is controlled by a robot and is tracked in real time using ultrasound images. This ensures that is possible to adjust the needle's path and guide it guide through biological tissue with sub-millimetre level accuracy. Momen Abayazid's doctoral research involved the developed of the robotic test-bed and the control that guides the needle as well as the 3D needle localization algorithm using ultrasound images.
Human-in-the-loop studies
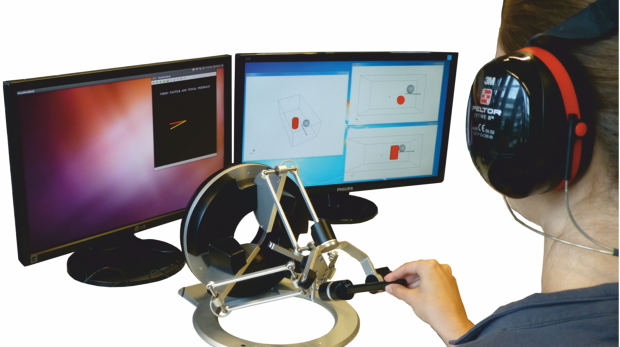
In order to promote the acceptance in clinical practice and to combine the robotic system's accuracy with clinical expertise, Mr. Abayazid also developed a system that allows the clinician to have control. In this version the clincian inserts the needle, while being given guidance and cues by the robotic system with the help of vibrations and visual feedback. Thanks to such a "shared-controlled" system it could be possible in the future to have needle be guided by a clinician who is in a different location than the patient. For example, the researchers have successfully guided the needle located in Enschede, Netherlands from the city of Sienna, Italy.
Finally the developed system has been integrated with an ultrasound-based, automated breast volume scanner (ABVS). By combining the proposed system with a robotic, clinically approved ABVS system it is possible to bring robotic needle guidance from the research lab to the operating room.
Clinical studies in humans
According to thesis supervisor prof. dr Sarthak Misra, Abayazid's research shows that the system is technically ready for application in humans. Misra expects the first clinical trials to begin in three to four years.
Provided by University of Twente




















