July 23, 2013 report
Researchers build self-assembling multi-copter distributed flight array (w/ Video)
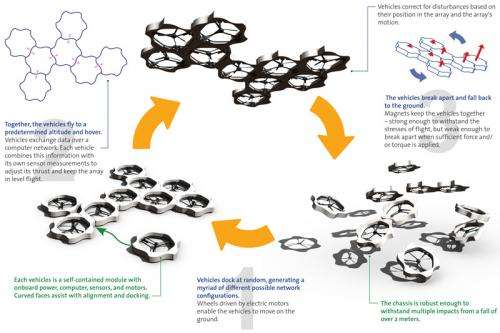
Researchers at ETH Zurich, a technical University in Switzerland, have developed a unique type of copter. It's made of several single rotor craft that physically connect to one another autonomously to create a larger multiple rotor craft. Because the craft is self-assembled, each time it takes flight, it has a different configuration. The researchers call their craft a Distributed Flight Array (DFA).
The point of the craft is to help students learn to understand distributed networks using a hands-on approach. To date, the team at ETH has built two such devices with two different means of communication, but the basic configuration remains the same. A number of individual copters, each shaped like a hexagon, roll around on a flat surface and eventually hook up in a random fashion with some or all of the others in the vicinity. After a moment of communication, each of the copters starts its rotor and the craft rises into the air and hovers, maintaining its balance. After another moment, the individual copters stop their rotors and the craft falls to the ground, breaking apart into individual copters again. Thus far the research group, which is made up of professors and students, acknowledges that the DFA doesn't really serve any purpose other than as a teaching aid, but it does hold a certain beauty as the individual bots work together to achieve what none of them can alone.
Each individual copter has inertial sensors that monitor tilt and roll and a processor that converts the sensor data to spin speed of its rotor. By itself, it's incapable of flight—torque causes it to crash immediately upon takeoff. To offset torque, half of the copters in the multi-copter craft spin their rotors in the opposite direction of the other half.
One test unit has the individual copters communicating via infrared signaling, the other through metal pins on the sides of bots. Also, one group has latches to allow the copters to physically connect to one another, the other magnets. Both configurations rely on a distributed network to operate, which means that there is no central control. Each of the copters monitors itself and makes adjustments as it sees fit. The end result is a multi-configuration craft that is able to lift itself off the ground and hover (keeping itself level) in the air and then return to Earth, with very minimal input (joystick control to keep the craft from wandering away) from its human operators.
While the DFA itself might not be commercialized, concepts learned by students who helped create it will almost certainly be applied some day, helping to create multifaceted robots carrying out yet to be imagined missions.
More information: www.idsc.ethz.ch/Research_DAndrea/DFA
© 2013 Phys.org




















