June 14, 2012 weblog
Insect-like flying robots self-recover after crash (w/ Video)
(Phys.org) -- Autonomous flying robots? Yawn. Researchers from the Laboratory of Intelligent Systems at Switzerland’s EPFL wanted to go a step beyond. They are aware of nimble, adept flying robots that do not navigate into obstacles; what if, taking their inspiration from flying insects, they created flying robots that hit obstacles, crash, but get back to flying again? Even flying robots designed in the past to be capable of flight in cramped and cluttered environments left the team hoping to improve on limitations. As they noted, current systems might launch and fly well, but contact with obstacles might prove catastrophic and bring on “mission-ending results.”
Their project has developed into designing autonomous flying robots that when making collision-contact with the environment have an upright mechanism to re-launch and keep flying. Their robots have uprighting mechanisms that allow them to “subsequently take off again after an otherwise mission-ending collision,” says the team.
Their project plans are focused on innovative optic-flow based algorithms resembling those used by insects that can help the robot control its speed. They are working on smart sensing within the robot's structure to detect the position and force of contact with the environment. The legs ensure it can stand up and return to flight no matter what position it is in. Like insects trying to find a way out of a window, the can’t-be-defeated robot will bounce off obstacles or fly along a wall to reach an opening.
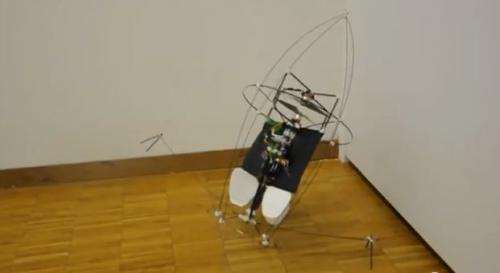
Adam Klaptocz, a doctoral candidate in robots at the EPFL is the lab narrator of a video that shows how the project’s flying robot can survive a crash by picking itself back up and taking flight again. The recovery system consists of legs that kick out to spring the robot upright. “This type of robot could be useful in exploring hard-to-reach or dangerous areas, places with little light, caves, collapsed mines or nuclear power plants,” said Klaptocz. For this to work successfully so that the robot device does not snap or bend, the lab team designed a part-protecting carbon fiber cage. This structure does not add excess weight or drag that would throw off the calibrated control systems and interfere with the center of gravity.
Their research work, “An Active Uprighting Mechanism for Flying Robots,” appears in the journal IEEE Transactions on Robotics.
Their method is demonstrated on a tailsitter flying robot, which is capable of consistently uprighting after falling on its side using a spring-based leg and returning to the air to continue its mission.
Talking about their research goals, they hope overall that they get closer to mimicking the “impressive flying characteristics” seen in insects and “to understand the mechanics and control required to create a truly useful and robust indoor flying robot.”
More information: An Active Uprighting Mechanism for Flying Robots, IEEE Transactions on Robotics, Volume: PP , Issue: 99, Page(s): 1-6, doi:10.1109/TRO.2012.2201309
ABSTRACT
Flying robots have unique advantages in the exploration of cluttered environments such as caves or collapsed buildings. Current systems, however, have difficulty in dealing with the large amount of obstacles inherent to such environments. Collisions with obstacles generally result in crashes from which the platform can no longer recover. This paper presents a method to design active uprighting mechanisms for protected rotorcraft-type flying robots that allow them to become upright and subsequently take off again after an otherwise mission-ending collision. This method is demonstrated on a tailsitter flying robot, which is capable of consistently uprighting after falling on its side using a spring-based ``leg'' and returning to the air to continue its mission.
Journal information: IEEE Transactions on Robotics
© 2012 Phys.Org





















