September 27, 2011 weblog
Flocking robots take to the sky (w/ video)
(PhysOrg.com) -- The next time you look up in the sky and think you are seeing a flock of geese flying south for the winter, take a closer look. If you are in Lake Geneva, Switzerland, these flocks may actually be robots from the Laboratory of Intelligence Systems.
Researchers Sabine Hauert, Sebverin Leven and Dario Floreano have discovered a way to make small, fixed wing robots take to the sky and fly together without crashing and migrate. In order to accomplish this, the researchers needed to make the robots move at the same speed and direction, avoid collision and stay in close proximity. They will be presenting their work this week in San Francisco at the International Conference on Intelligent Robots and Systems.
In order to accomplish this, the researchers used a three-dimensional algorithm developed by Craig Reynolds in 1986 where the individual robots responds to its close neighbor but does not consider the actions of the group as a whole.
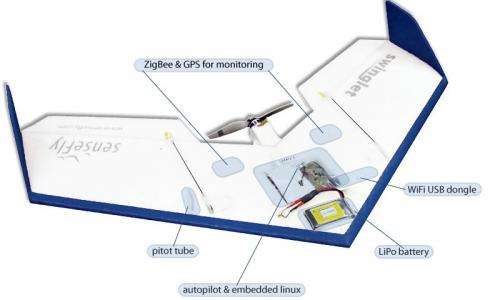
The robots were created by the robotics company senseFly and communicate with each other using a Wi-Fi dongle that is connected to an on-board Linux computer. They began with simple testing and have reached a total of 10 flocking birds at one time but simulations show they could use up to 100 flocking robots.
In addition to programming the robots to fly at the same speed, stay close and not collide, the researchers also added something else. They added the ability to migrate. This allows the researchers to set a pre-programmed destination for the swarm to travel to.
The intended use for these flocking robots is to image and map the ground as well as the potential to be used for search and surveillance missions.
More information: lis.epfl.ch/smavs
© 2011 PhysOrg.com




















